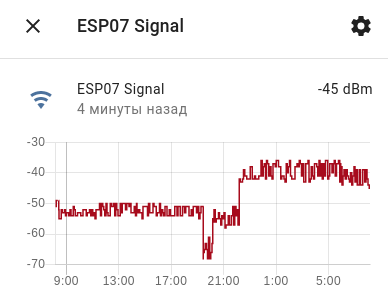
До 21:00 только собственная антенна. После 21:00 внешняя антенна.
Расположение вертикальное.
Все для создания Роботов и не только.
До 21:00 только собственная антенна. После 21:00 внешняя антенна.
Расположение вертикальное.
Цветная схема.V3-Tasmota-MQTT-Ethernet-Module-6relay-COLOR
 |
|
 |
 |
template {“NAME”:“WT32-ETH01”,“GPIO”:[1,1,1,1,1,1,0,0,1,0,1,1,3840,576,5600,0,0,0,0,5568,0,0,0,0,0,0,0,0,1,1,0,1,1,0,0,1],“FLAG”:0,“BASE”:1}

Также можно установить и просто Wi-Fi модуль ESP8266.

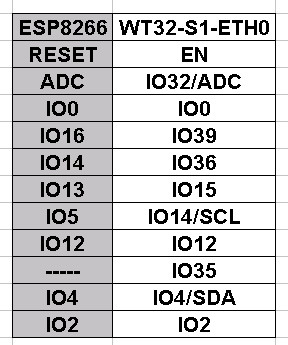
DipTrace Schematic – ESP-12E-replace-WT32-ETH01-V3
p.s. AIN1 – при установки WiFi модуля отсутствует.


backlog SetOption36 0;SetOption65 1;wificonfig 4; SetOption59 1
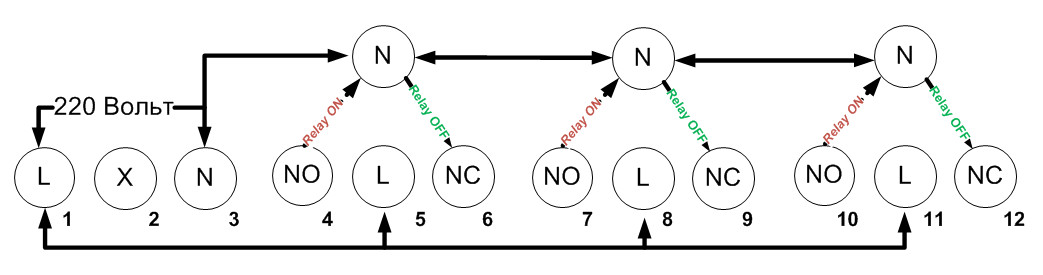
Реле
backlog sensor29 0,5,0; sensor29 1,5,0; sensor29 2,5,0; sensor29 3,5,0; sensor29 4,5,0; sensor29 5,5,0
Входы
backlog sensor29 8,2,1; sensor29 9,2,1; sensor29 10,2,1; sensor29 11,2,1
backlog sensor29 12,2,1; sensor29 13,2,1; sensor29 14,2,1; sensor29 15,2,1
rule
on event#MCPINT_D15=1 do power0 on endon on event#MCPINT_D15=0 do power0 off endon
on event#MCPINT_D14=1 do power0 on endon on event#MCPINT_D14=0 do power0 off endon
on event#MCPINT_D13=1 do power6 on endon on event#MCPINT_D13=0 do power6 off endon
on event#MCPINT_D12=1 do power5 on endon on event#MCPINT_D12=0 do power5 off endon
on event#MCPINT_D11=1 do power4 on endon on event#MCPINT_D11=0 do power4 off endon
on event#MCPINT_D10=1 do power3 on endon on event#MCPINT_D10=0 do power3 off endon
on event#MCPINT_D9=1 do power2 on endon on event#MCPINT_D9=0 do power2 off endon
on event#MCPINT_D8=1 do power1 on endon on event#MCPINT_D8=0 do power1 off endon
Включить правила.
rule 1
p.s. Перепрошивка:
esptool.py –chip esp32 –port /dev/ttyUSB0 –baud 115200 –before default_reset
–after hard_reset write_flash -z –flash_mode dout –flash_freq 40m
–flash_size detect 0x1000 ../bootloader_dout_40m.bin 0x8000 ../partitions.bin
0xe000 ../boot_app0.bin 0x10000 .pio/build/tasmota32/firmware.bin


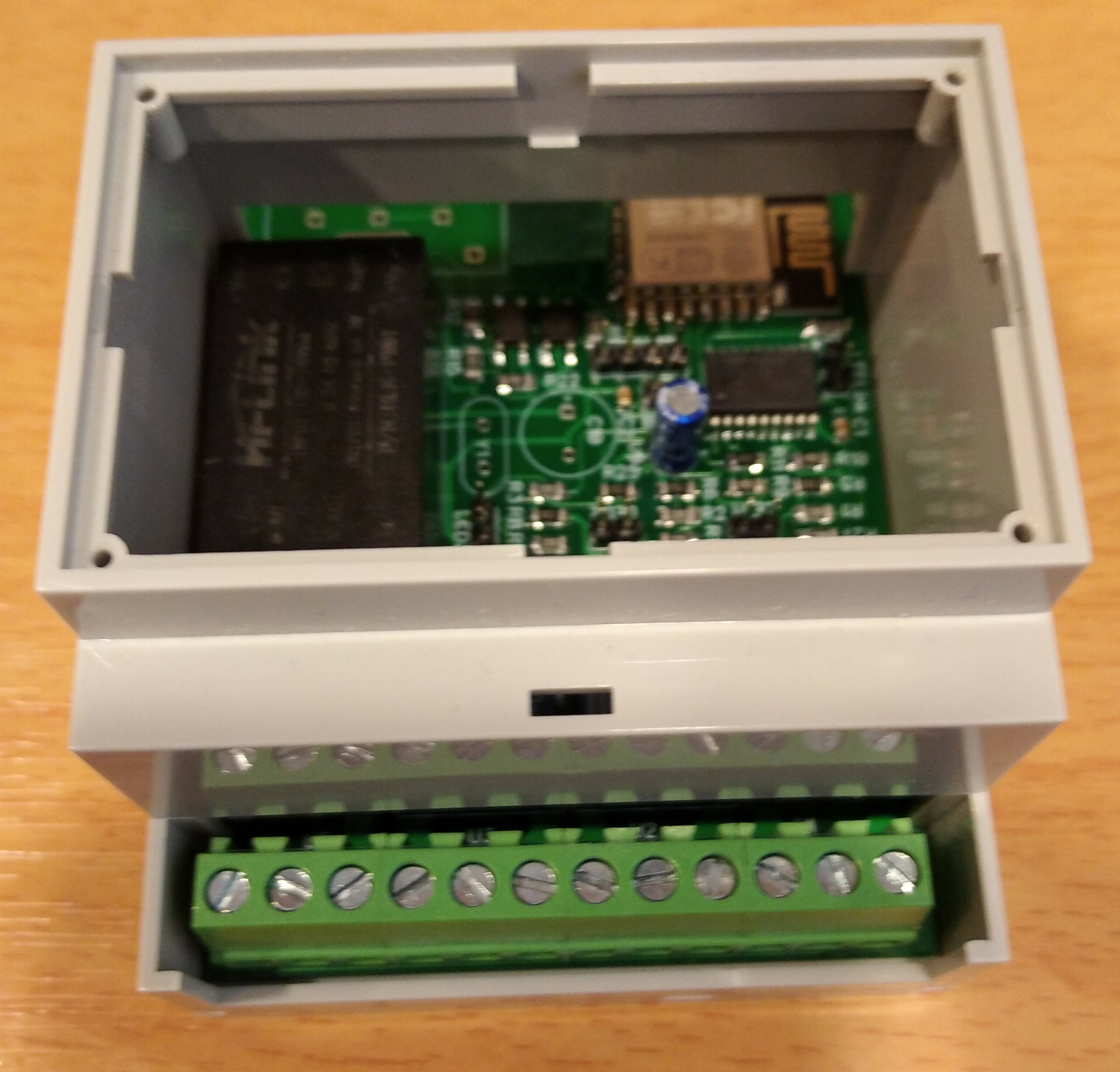
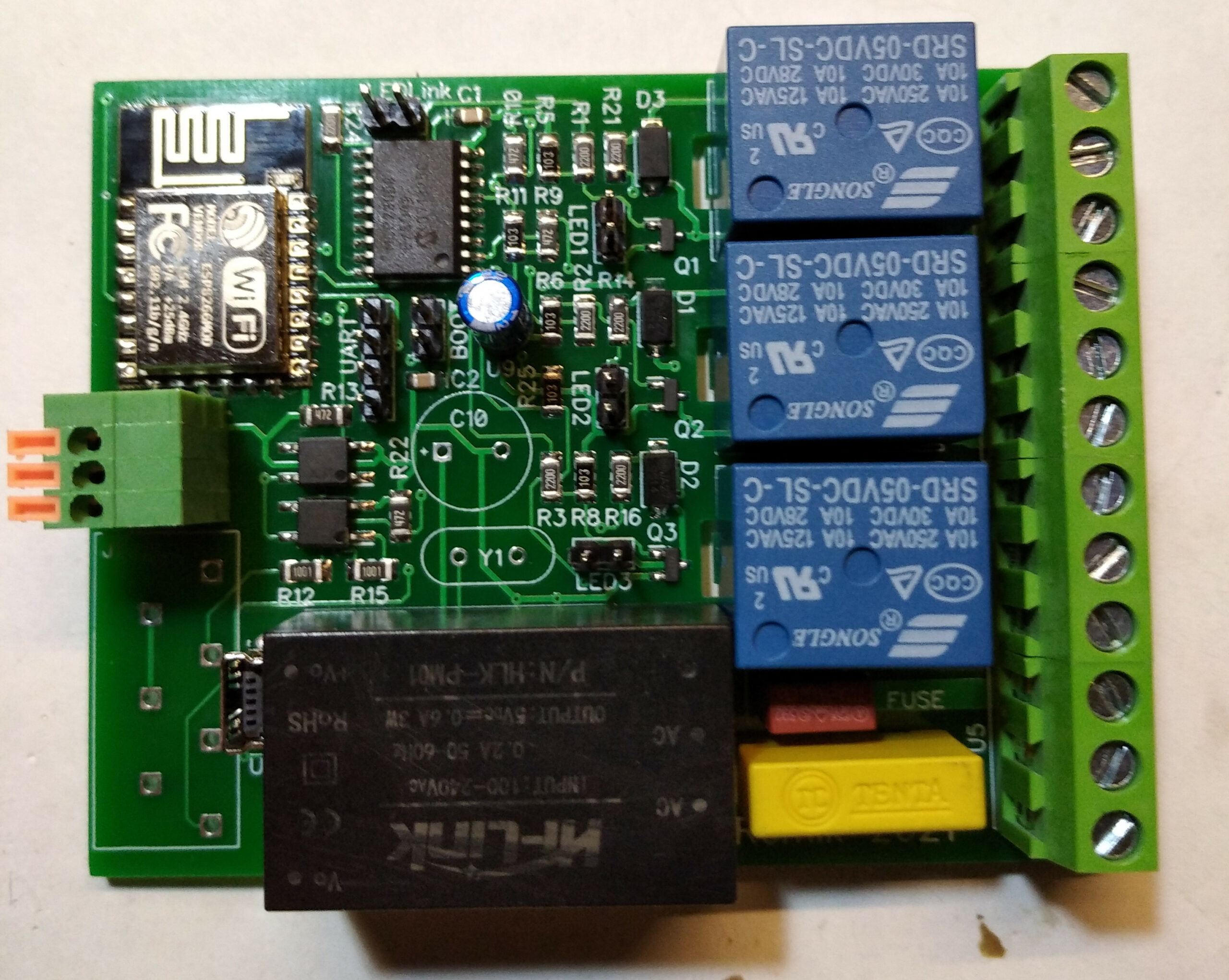
Схема: DipTrace Schematic – 3-relay-esp-12e-ver-1-0
MCP23008-E/SO, 8-битный расширитель порта ввода/вывода
backlog sensor29 0,5,0; sensor29 1,5,0; sensor29 2,5,0
backlog sensor29 3,2,1; sensor29 4,2,1
backlog SetOption36 0;SetOption65 1;wificonfig 4
SetOption59 1
rule
on event#MCPINT_D3=1 do power2 toggle endon on event#MCPINT_D3=0 do power2 toggle endon
on event#MCPINT_D4=1 do power3 toggle endon on event#MCPINT_D4=0 do power3 toggle endon
Индикация включения реле.
RULE
ON EVENT#MCPINT_D3=1 DO POWER1 TOGGLE ENDON
ON EVENT#MCPINT_D3=0 DO POWER1 TOGGLE ENDON
ON EVENT#MCPINT_D4=1 DO POWER2 TOGGLE ENDON
ON EVENT#MCPINT_D4=0 DO POWER2 TOGGLE ENDON
ON EVENT#MCPINT_D5=1 DO POWER3 TOGGLE ENDON
ON EVENT#MCPINT_D5=0 DO POWER3 TOGGLE ENDON
ON SYSTEM#BOOT DO POWER0 0 ENDON
LedLink IO14 – Внешний
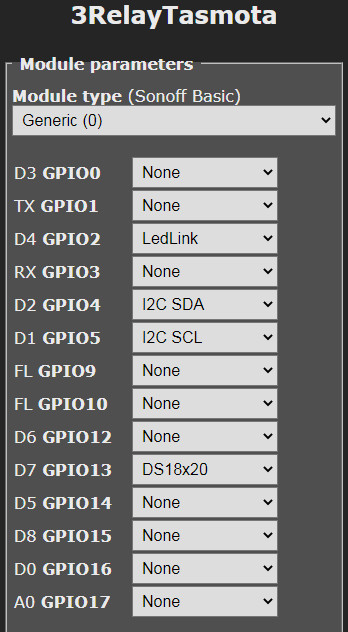
Выходы/Входы

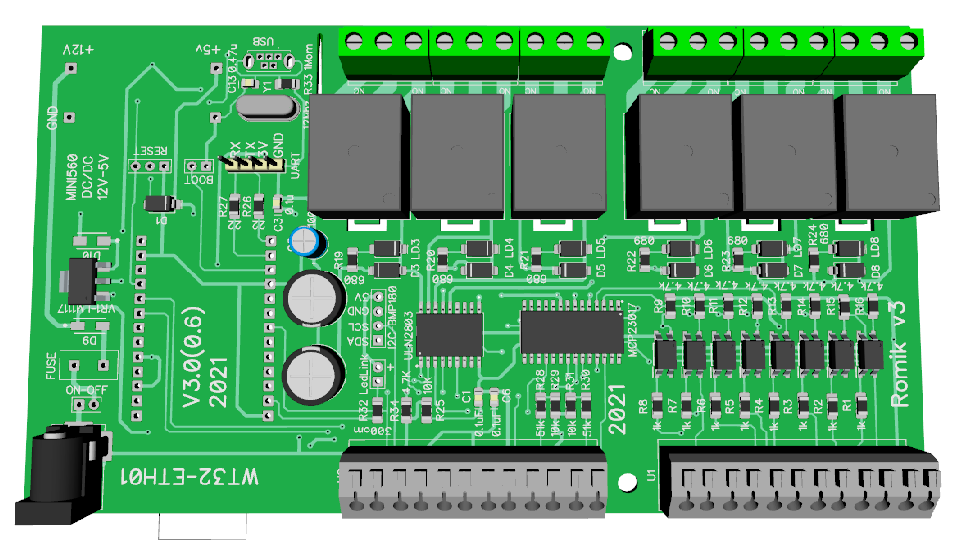
Реле 1 / Реле 2 / Реле 3 – расположения реле – вид сверху
![]()
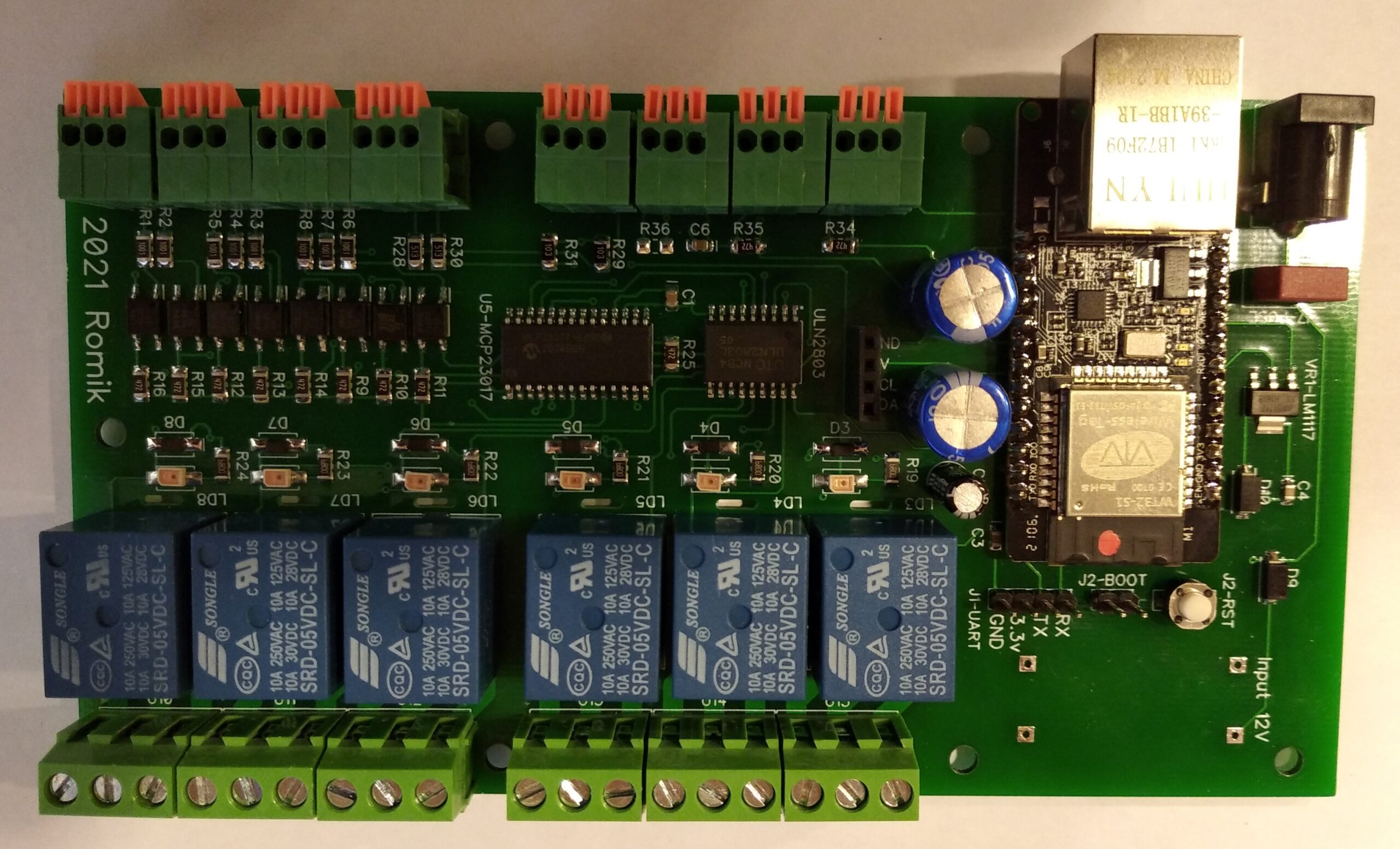
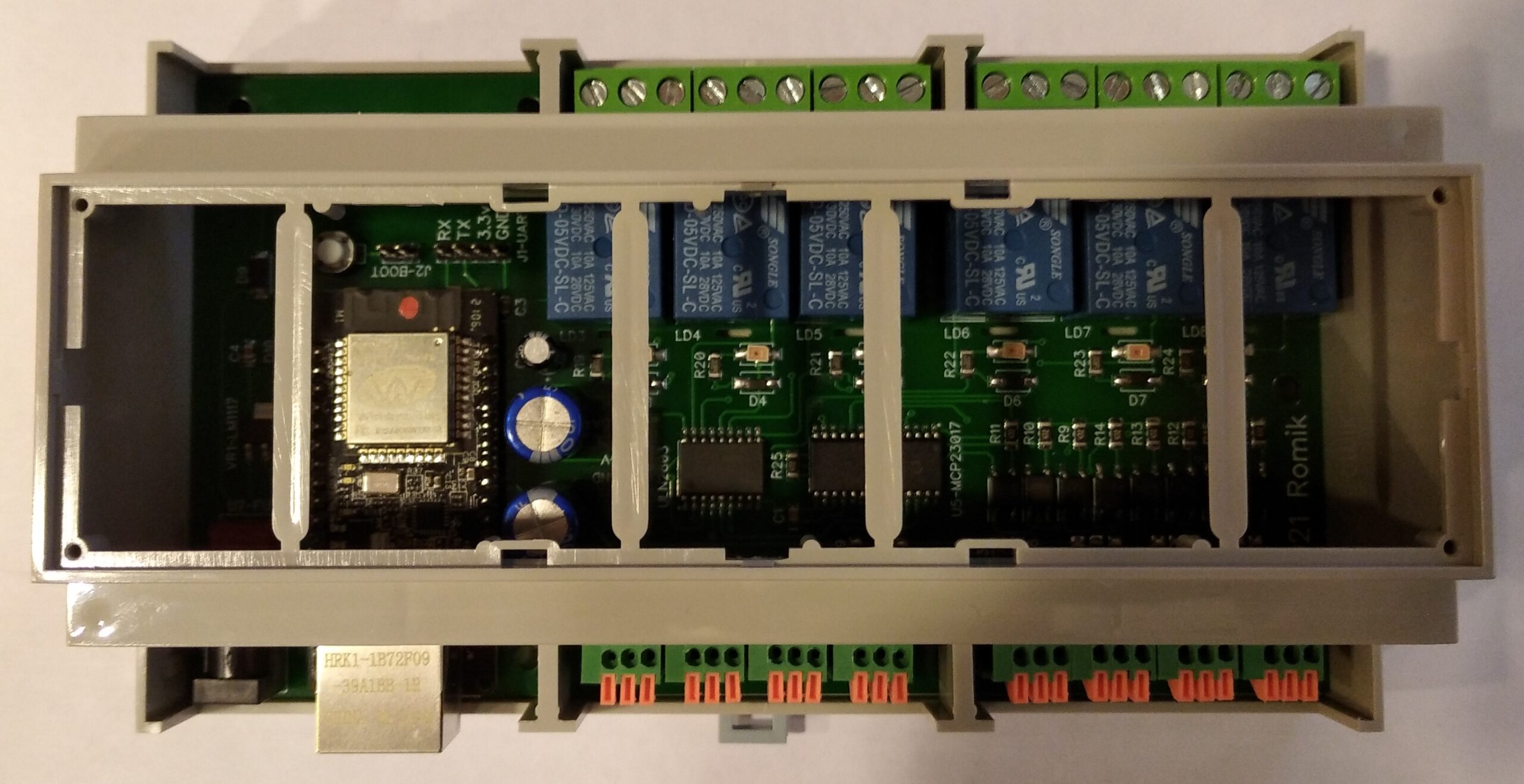
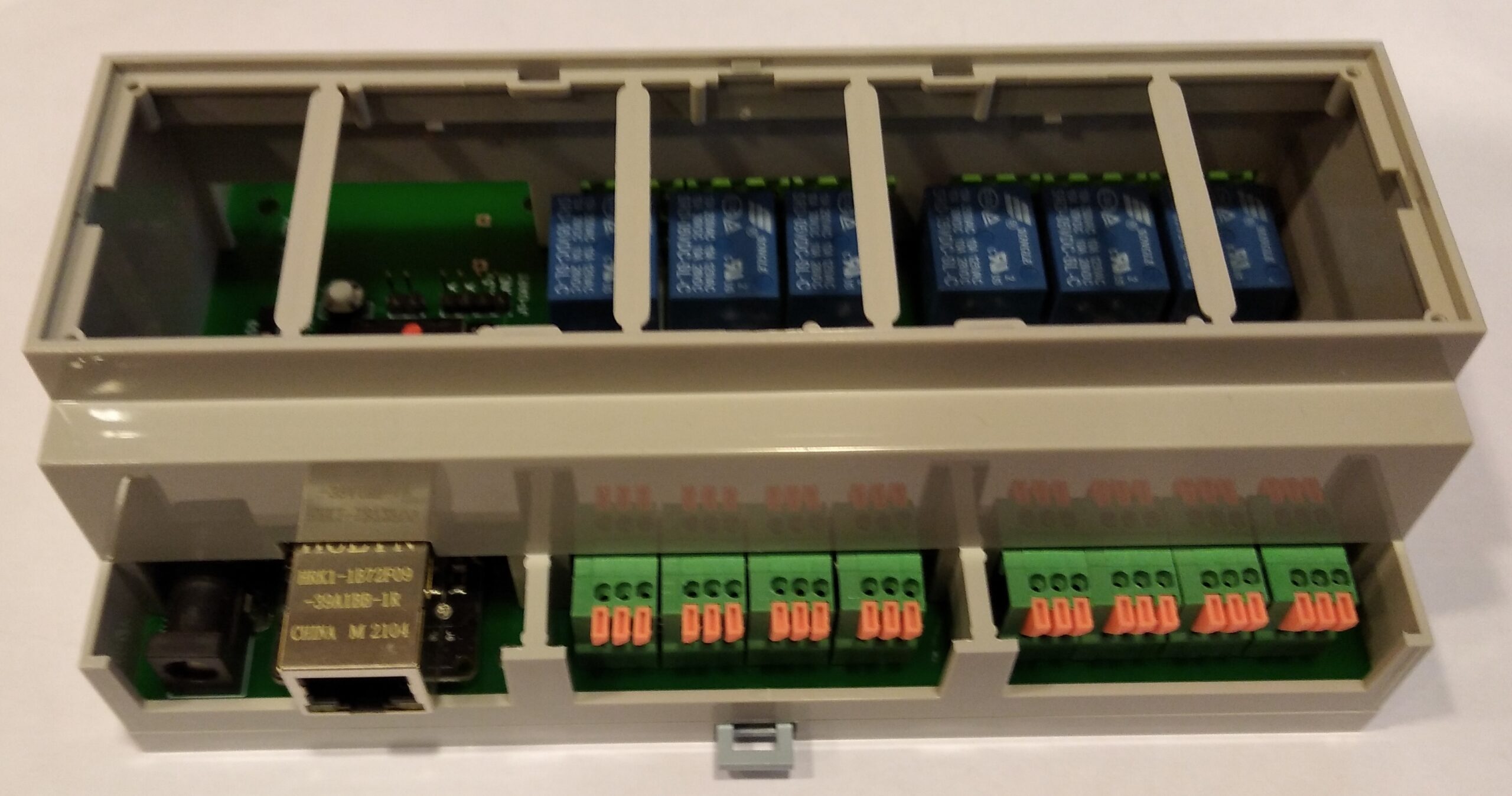

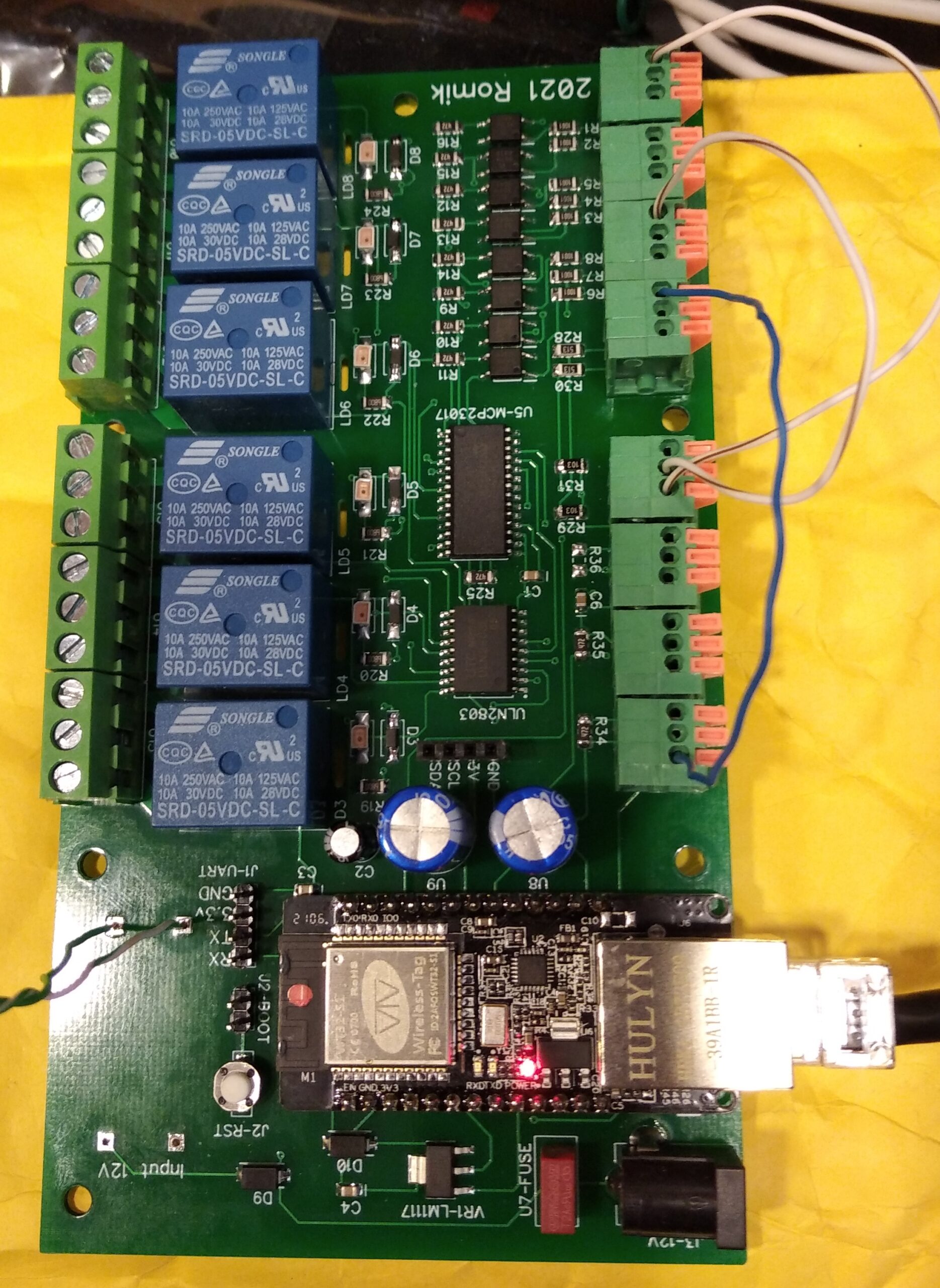
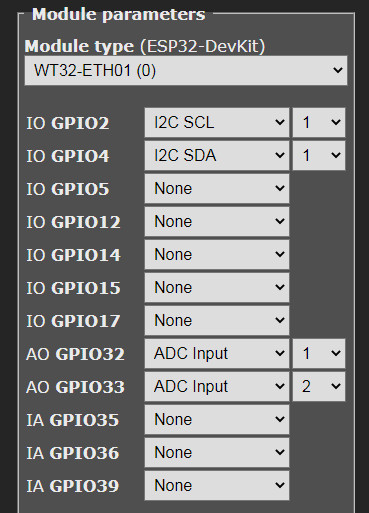
Схема: DipTrace Schematic – New-Tasmota-MQTT-Ethernet-Module-6relay
Для программирования SCL на GND
LedLink – GPIO17
rule
on event#MCPINT_D15=1 do power6 on endon on event#MCPINT_D15=0 do power6 off endon
on event#MCPINT_D12=1 do power3 on endon on event#MCPINT_D12=0 do power3 off endon
on event#MCPINT_D11=1 do power4 on endon on event#MCPINT_D11=0 do power4 off endon
on event#MCPINT_D10=1 do power5 on endon on event#MCPINT_D10=0 do power5 off endon
on event#MCPINT_D9=1 do power2 on endon on event#MCPINT_D9=0 do power2 off endon
on event#MCPINT_D8=1 do power1 on endon on event#MCPINT_D8=0 do power1 off endon
on event#MCPINT_D13=1 do power0 on endon on event#MCPINT_D13=0 do power0 off endon
on event#MCPINT_D14=1 do power0 on endon on event#MCPINT_D14=0 do power0 off endon
backlog sensor29 0,5,0; sensor29 1,5,0; sensor29 2,5,0; sensor29 3,5,0
backlog sensor29 4,5,0; sensor29 5,5,0
backlog sensor29 8,2,1; sensor29 9,2,1; sensor29 10,2,1; sensor29 11,2,1
backlog sensor29 12,2,1; sensor29 13,2,1; sensor29 14,2,1; sensor29 15,2,1
SetOption59 1
Template
backlog template {“NAME”:”WT32-ETH01″,”GPIO”:[0,3200,1,3232,1,1,0,0,1,0,1,1,5536,1,5600,0,0,0,0,5568,0,0,0,0,0,0,0,0,1,1,0,1,1,0,0,1],”FLAG”:0,”BASE”:1}; EthAddress 1; EthType 0; EthClockMode 0; module 0;
Запретить перегрузку и восстановление по умолчанию Template
SetOption36 0
SetOption65 1
wificonfig 4
backlog SetOption36 0;SetOption65 1;wificonfig 4


C1-4 – Общий для P1,P2,P3,P4
C5-8 – Общий для P5,P6,P7,P8
P3,4,5 – расположены немного не так – учтите при установки.
i15, i14 – Цифровые входа максимум 3.3 вольта.
A0, A1 – Аналоговые входы – максимум 5 вольт.



SMT Сборка – подготовка для монтажа из DipTrace. https://mysku.me/blog/diy/77605.html