Прошивка Tasmota Ethernet WT32-ETH01.
Все для создания Роботов и не только.
Оригинал.

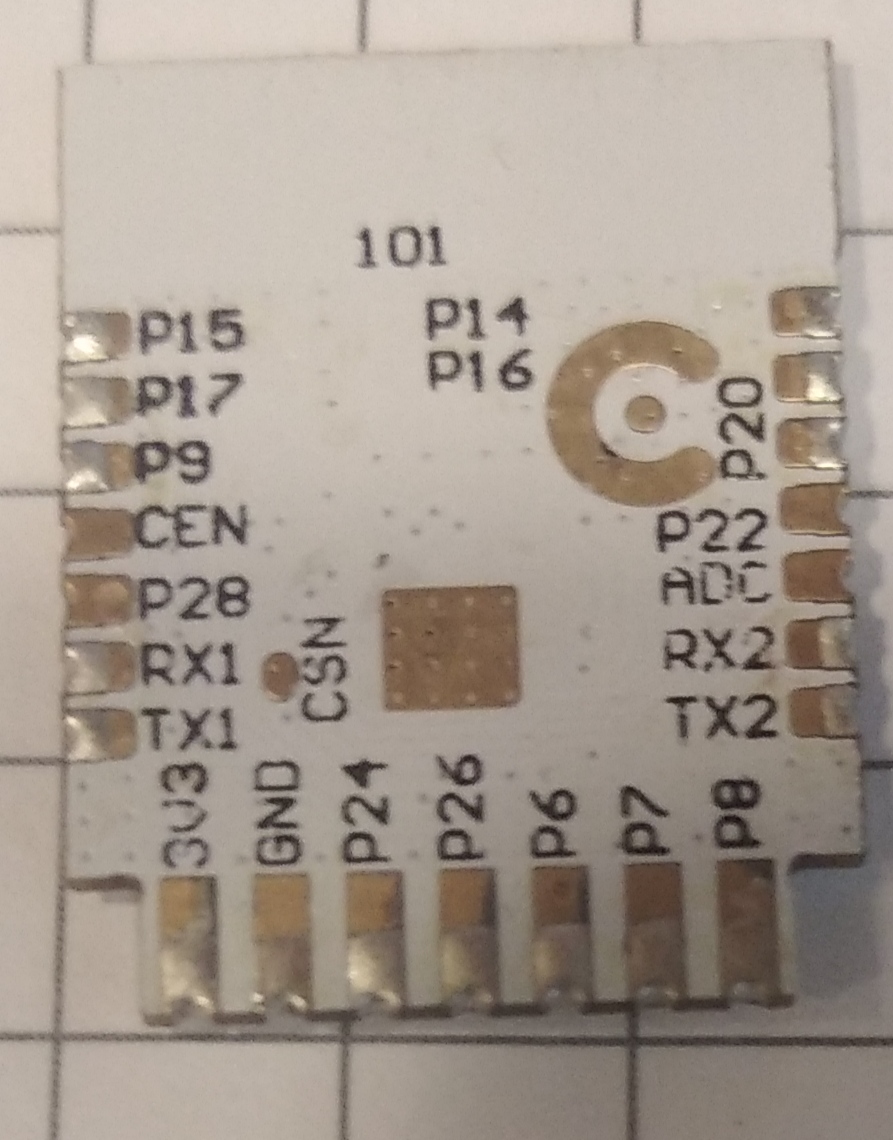
Pin(hardware) для BK7231N
Отпаяли оригинальный Wi-Fi чип BK7231N – хотя для него тоже есть прошивка как Tasmota, но очень кривая. Впаяли ESP-01 и все отлично работает.
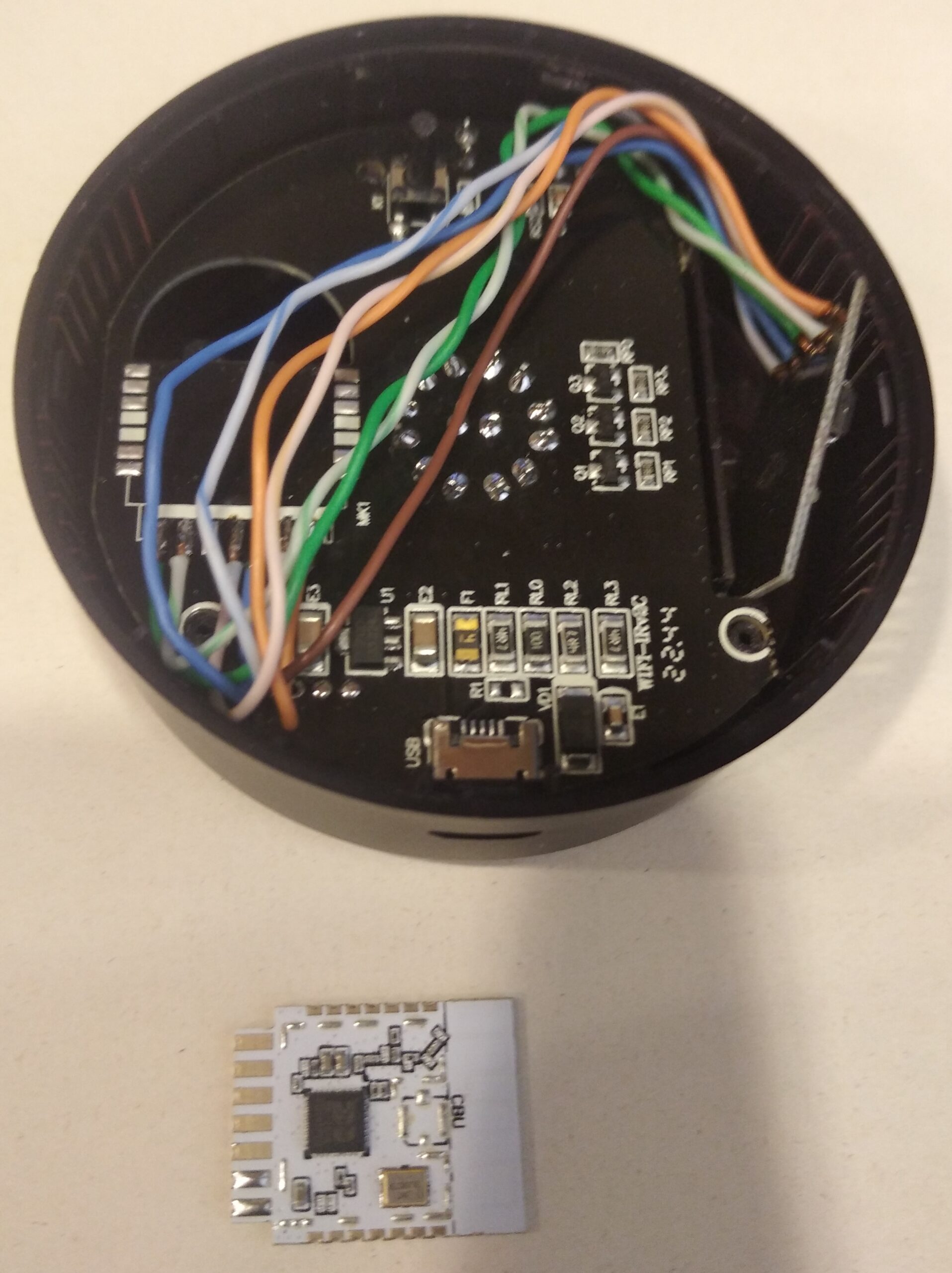
ESP-01
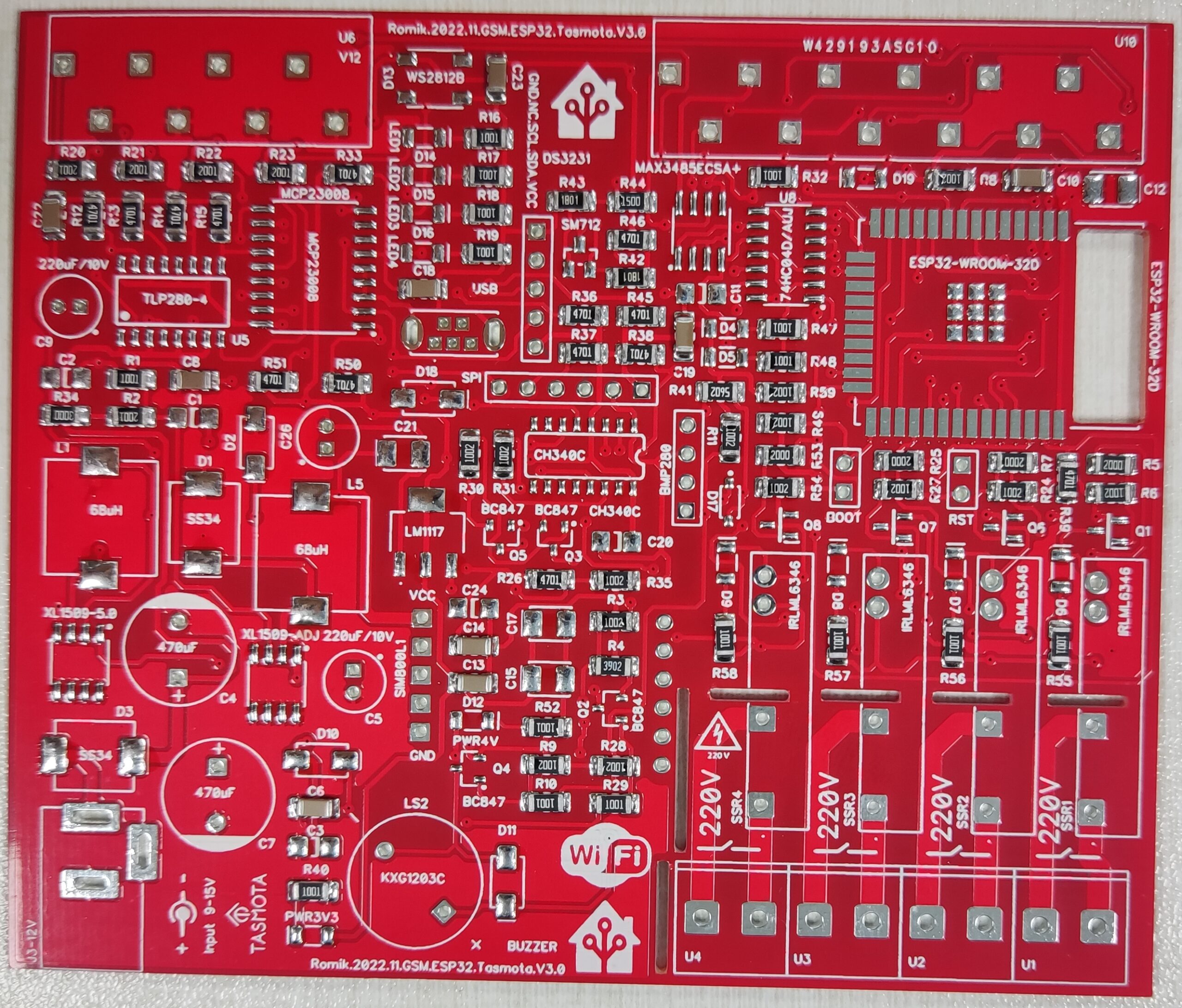
Хотелось бы рассказать что нужно сделать чтобы заказать поверхностный монтаж плат у PCBWay. Какие файлы необходимы и последовательность действий. Мы изготовили одну такую плату. Для тестирования данной возможности решили сначала распаять только все сопротивление и некоторые конденсаторы. Внизу вы видите результат монтажа.
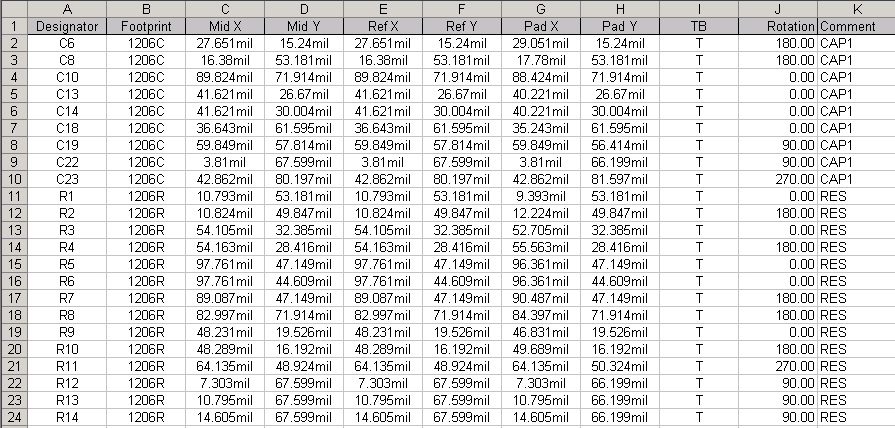
Как и везде Вам нужны будут два файла BOM (Bill of Materials) и CPL (Component Placement List). Данные файлы вы можете получить из Ваших программ в которых вы создавали схемы и разводили их. У каждого сервиса который занимается поверхностным монтажом есть свои нюансы для этих файлов. Вот пример таких для PCBWay.
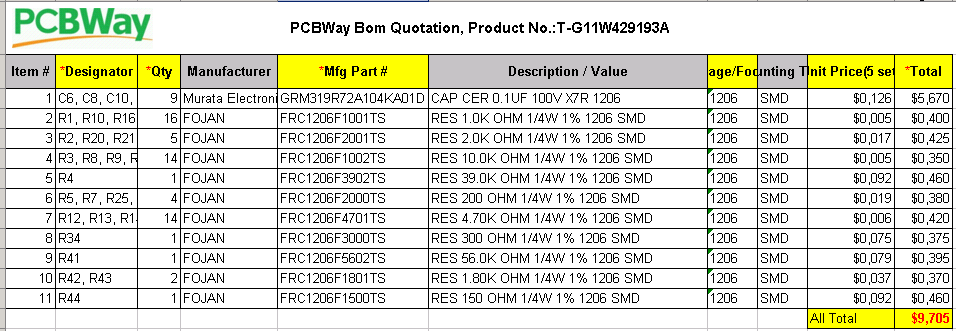
BOM Файл.

CPL Файл.
А теперь самое важное и интересное. В BOM файле есть поле Mfg Part# – так вот это поле нужно заполнить самим, взяв номера деталей которые вы хотите разместить на своей плате. Получить данный номер можно в On-Line магазине по продаже электронных компонентов (лучше конечно китайский). Есть такой известный магазин https://www.lcsc.com/ в котором можно найти практически все что Вам нужно. Заходите на сайт магазине, находите нужный Вам элемент и копируете его Mfg Part к себе в BOM файл.

Выделено желтым цветом. Выбирайте детали подешевле и конечно по наличию в магазине. После того как все файлы готовы Вы можете перейти к заказу на изготовление платы и заказ поверхностный монтажа. При оформлении заказа и заполнения полей, если Вы что то не поняли их можно не заполнять.
После этого Вам пришлют BOM файл с ценами на детали которые Вы выбрали. Если Вас все устраивает Вы соглашаетесь, оплачиваете и процесс изготовления и монтажа будет запущен в работу. Не смущайтесь если увидите что время монтажа будет указан очень долгим. В действительности все делается примерно в течении недели.
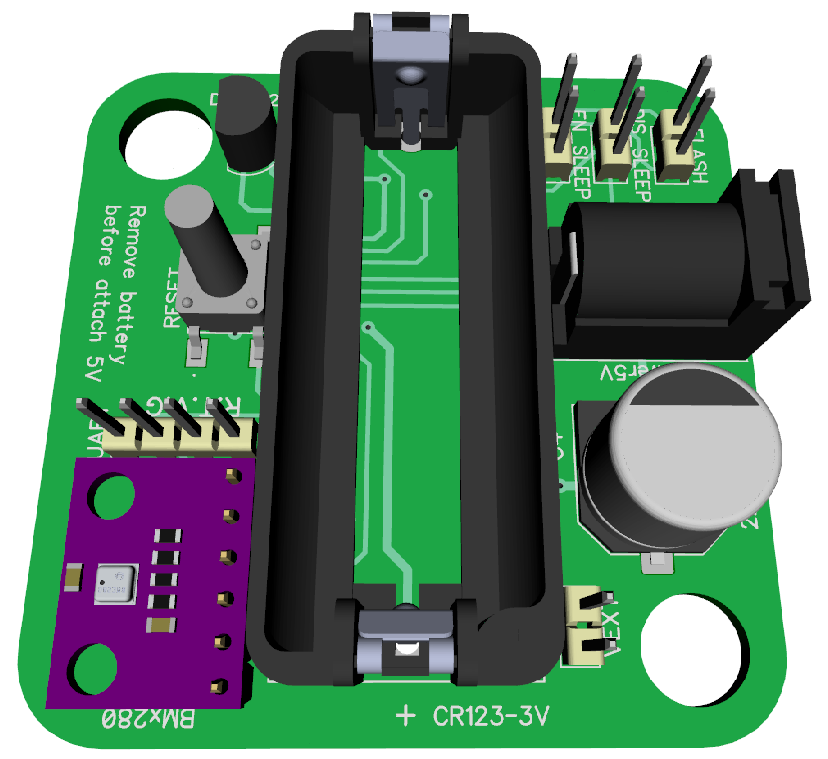
Вот наш полностью готовый проект.

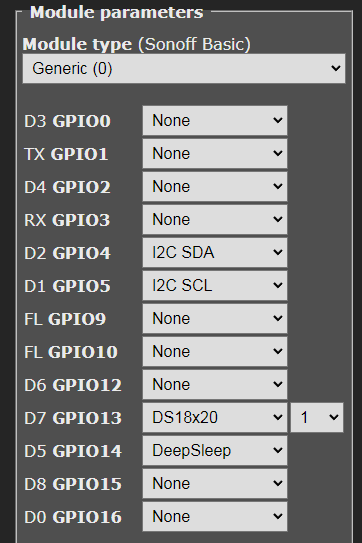
Маленькая погодная станция, которая работает от батарейки. В основе станции наш любимый модулю ESP-12F с прошивкой Tasmota. Принцип работы очень просто, передавать температуру, влажность и давление каждые 5-15 минут. В Tasmot-e есть возможность переводить ESP-12F в режим сна (DeepSleepTime) для сохранения энергии. После нескольких экспериментов, стало понятно что все работает. Еще в Tasmota-e есть отличная функция, показывать напряжение питание модуля. Для включения нужно в конфигурации подключить опцию #define USE_ADC_VCC. Смотрите рисунок ниже с данными по состоянию питания. Сейчас все это тестируется. 12.01.2023 Включен режим DeepSleepTime 900; Teleperiod 30
Особенности проекта:
Плата разработана на DipTrace-е, производство плат было заказано на PCBWay (Многофункциональный сервис по изготовлению печатных плат). Давно пользуюсь услугами данного производителя плат, нареканий нет, быстрое и качественное изготовление и быстрая доставка.



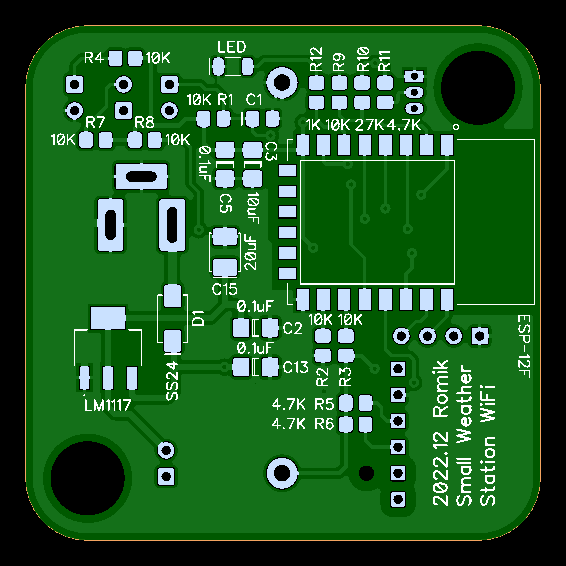
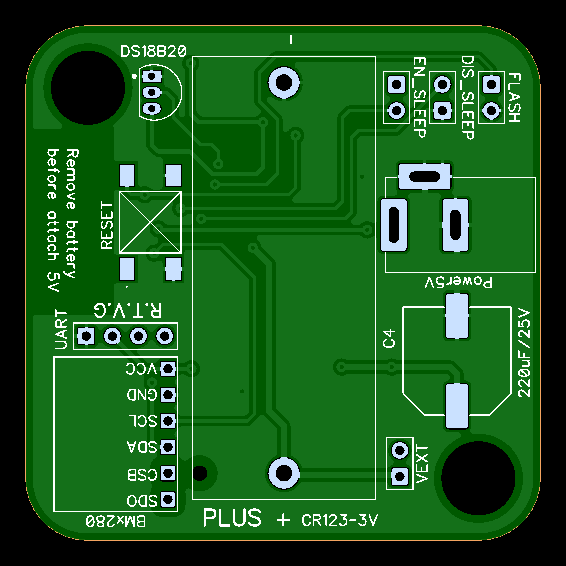
SMALL-Weather-Station-ESP8266 Схема (Schematics)
LedLink = GPIO12
Корпус.

Tyco 65002 55x55x32
DeepSleep
https://github.com/tasmota/docs-7.1/blob/master/DeepSleep.md
Все отлично работает.
Пример работы:
tele/SWS/LWT Offline 01-12 10:16:28
tele/SWS/SENSOR {"Time":"2023-01-12T10:16:25","DS18B20":{"Id":"3C41F6492F31","Temperature":22.5}} 01-12 10:16:25
tele/SWS/STATE {"Time":"2023-01-12T10:16:25","Uptime":"0T00:00:26","UptimeSec":26,"Vcc":3.231} 01-12 10:16:25
tele/SWS/SENSOR {"Time":"2023-01-12T10:16:10","DS18B20":{"Id":"3C41F6492F31","Temperature":22.3}} 01-12 10:16:10
tele/SWS/STATE {"Time":"2023-01-12T10:16:10","Uptime":"0T00:00:11","UptimeSec":11,"Vcc":3.194} 01-12 10:16:10
tele/SWS/LWT Online 01-12 10:16:00
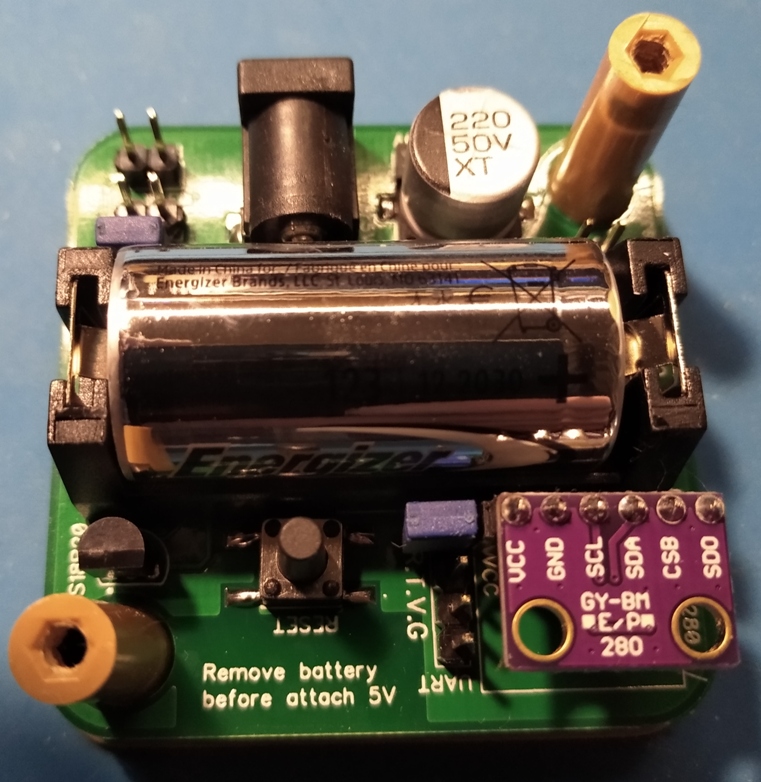
Напряжение.
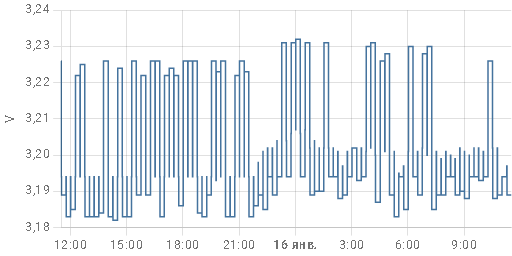
На батарейке CR123A – работает 1 Месяц. Будем изучать как продлить жизнь.
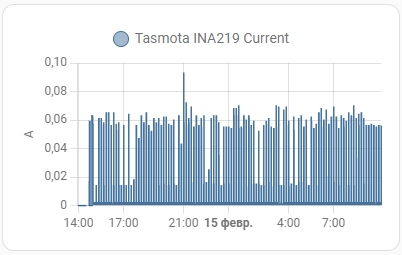
В режиме DeepSleep INA219 показывает 1 мА. Вот график с частотой просыпания 5 минут.
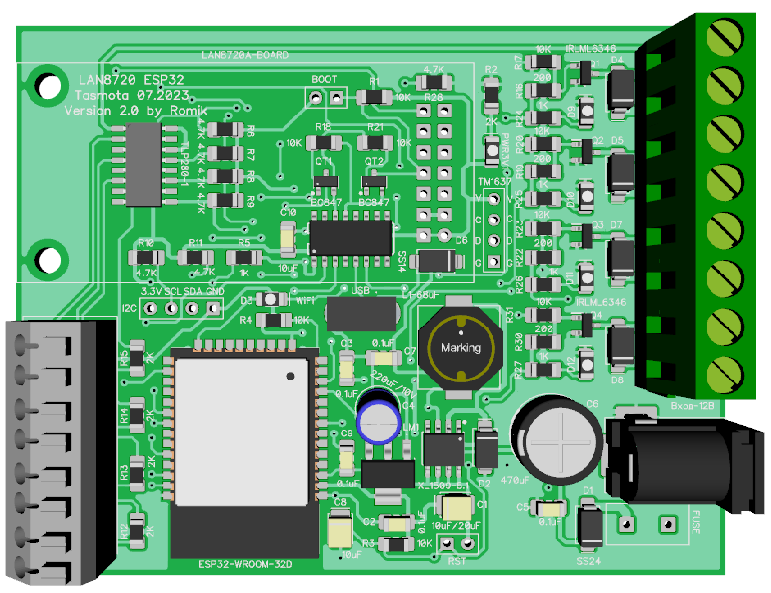
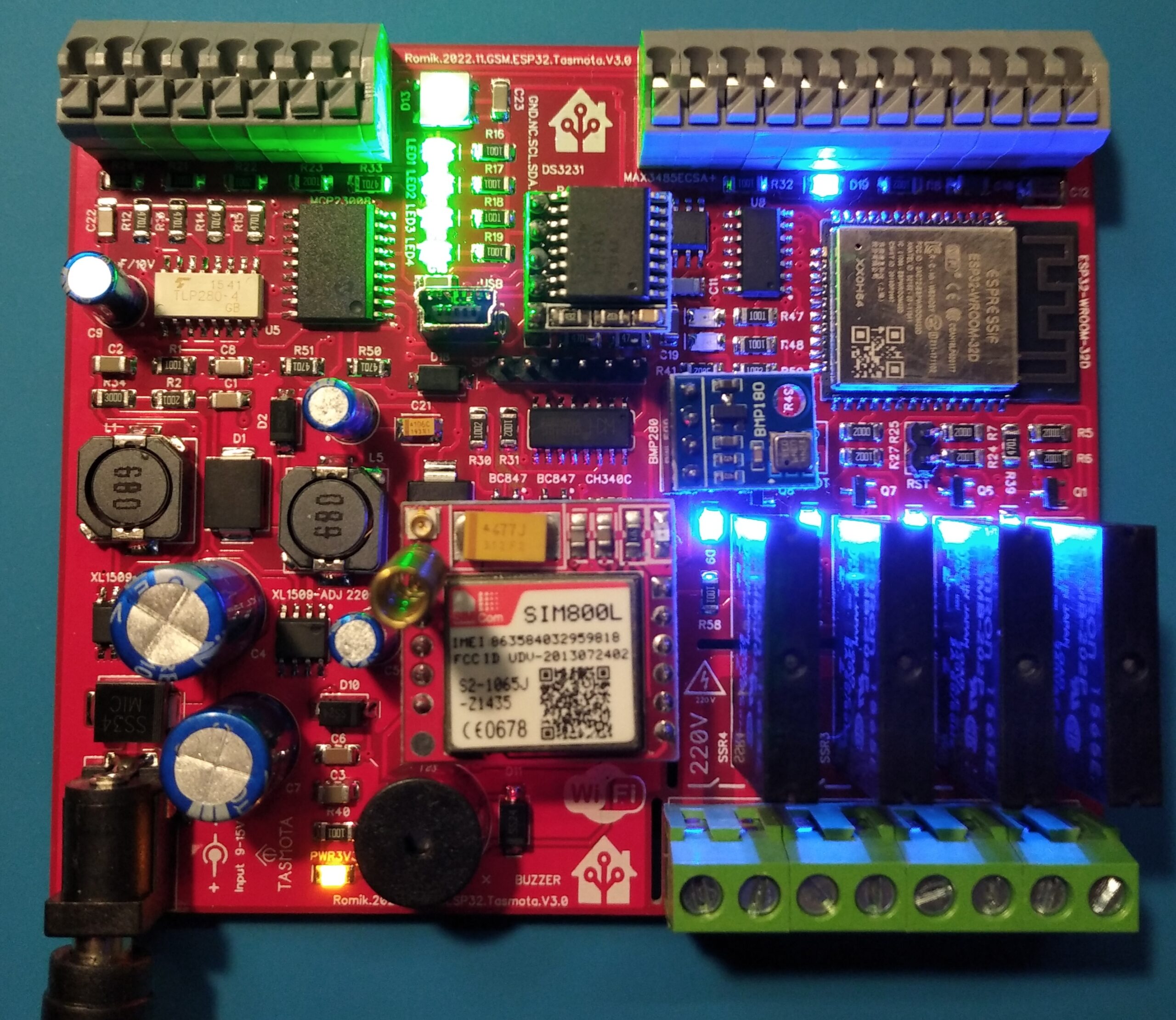
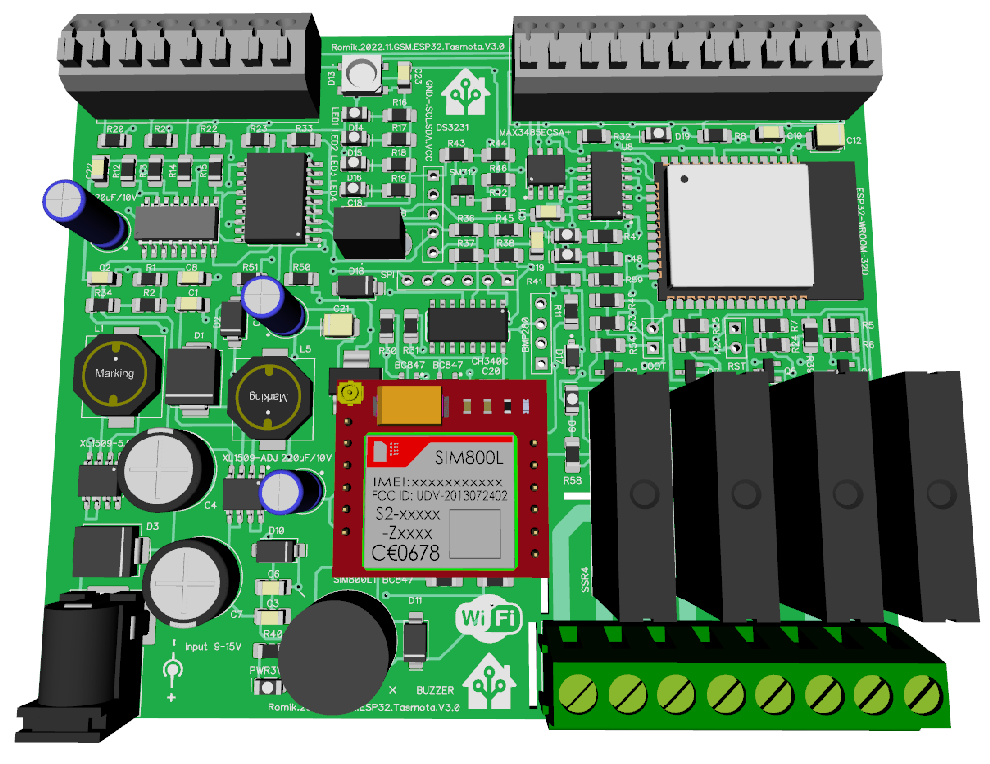
Улучшенная версия ESP32-GSM-Tasmota-Relay V3.0. Исправлены ошибки, удалены не нужные интерфейсы OpenTherm, добавлены 4xSSR (Твердотельные реле), добавлена возможность установить BMP280 и RTC(Real Time Clock DS3231) одновременно и даже подключить TM1637. SPI на плате также присутствует. Небольшой пример использования Berry на Tasmota для отправки SMS и управление портами через GSM. gsm-berry-tasmota-ver-1-0 (PDF)
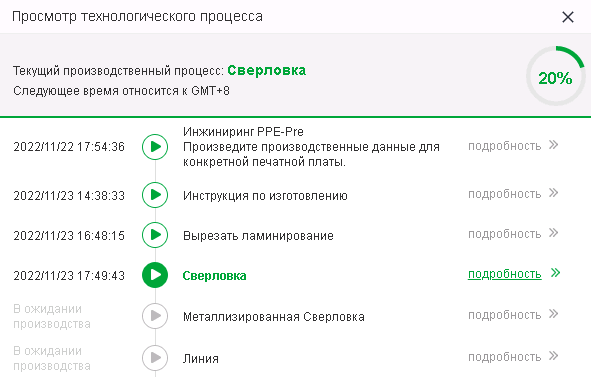
Готовим платы к производству.



Всегда можно посмотреть процесс изготовления Вашей платы.
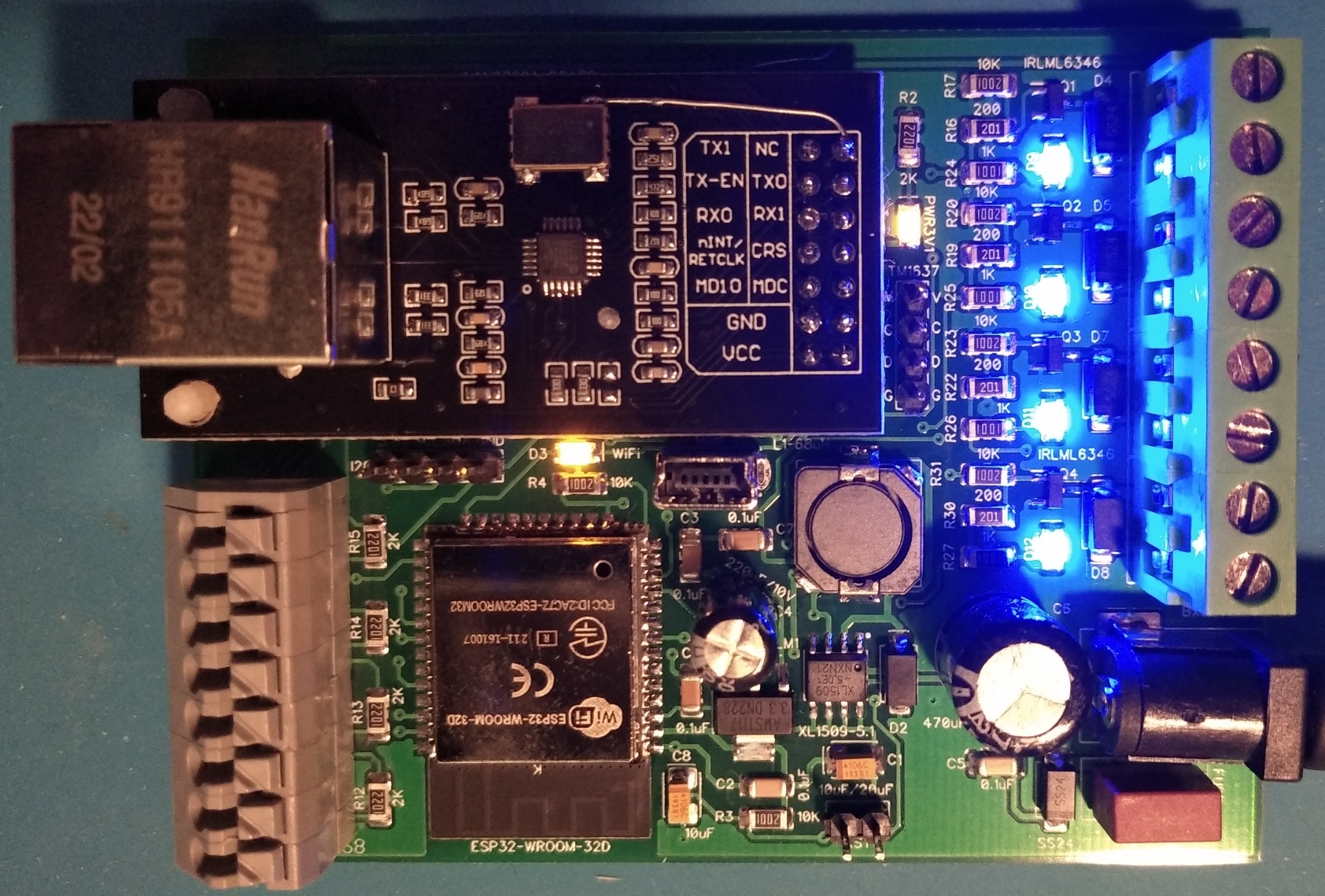
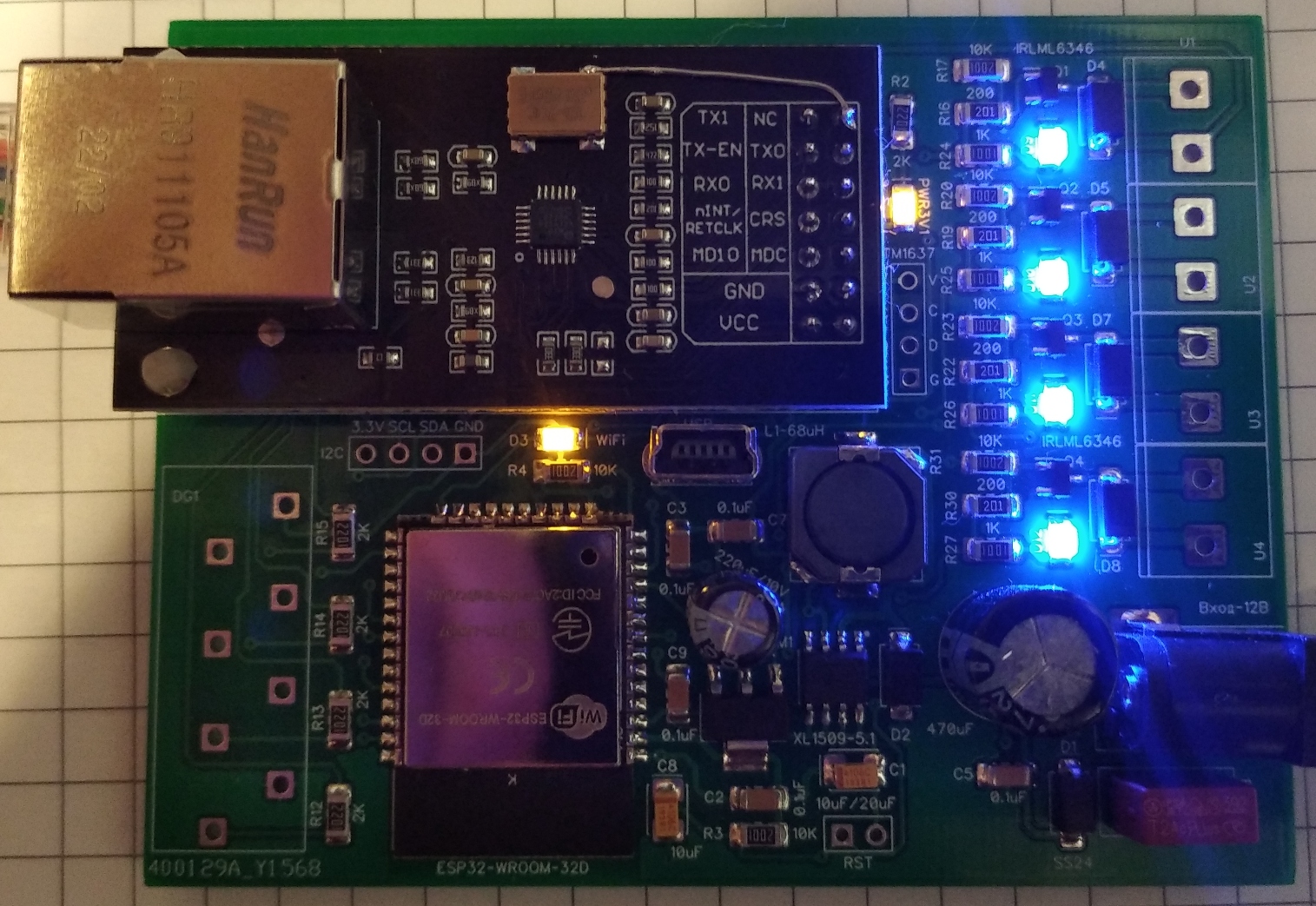
Процесс сборки (Монтаж PCB)

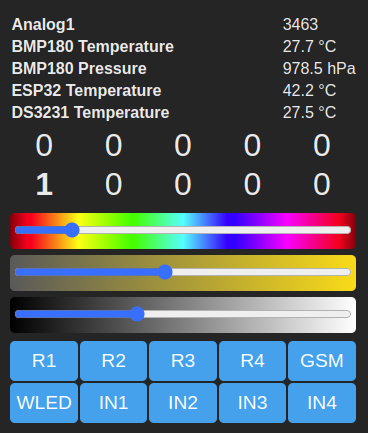
Analog1 = Напряжение на GSM модеме. R1 = 4.7K, R2 = 10K
V = (R1+R2)/R2 * (Analog1 * 3.3)/4095
V= ((4700+10000)/10000) * (3359*3.3)/4095 = 3.97V
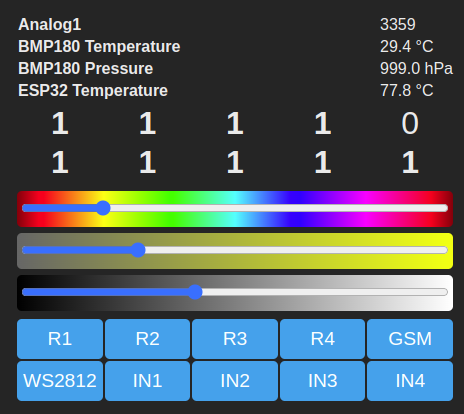
Управление RGB(WS2812B) светодиодом:
SetOption17 1 – To set color units to R,G,B,W (0-255):
color 255,0,0,0 – Red
color 0,255,0,0 – Green
color 0,0,255,0 – Blue
color 0,0,0,255 – White
backlog color 0,0,255,0;dimmer 40
Улучшения по сравнению с предыдущими версиями.

Еще немного фото.

Настройка:
Для инициализации GSM модема при старте или рестарте.
rule ON System#Boot do backlog power1 on;power1 off endon
При всех модулях.
backlog webbutton1 R1;
webbutton2 R2;
webbutton3 R3;
webbutton4 R4;
webbutton5 GSM;
webbutton6 WLED;
webbutton7 CLOCK;
webbutton8 IN1;
webbutton9 IN2;
webbutton10 IN3;
webbutton11 IN4
Управление MCP23008:
Входа
backlog sensor29 0,2,1; sensor29 1,2,1; sensor29 2,2,1; sensor29 3,2,1
Индикация входа
backlog sensor29 4,5,0; sensor29 5,5,0; sensor29 6,5,0; sensor29 7,5,0
Посылаем SMS BerryScript:
var ser,msg
ser = serial(16, 17,115200, serial.SERIAL_8N1)
def sim800l(cmd, idx, payload, payload_json)
ser = serial(16, 17,115200, serial.SERIAL_8N1)
ser.write(bytes().fromstring(‘AT+CMGF=1\n’))
msg = ser.read()
ser.write(bytes().fromstring(‘AT+CMGS=\”+74951234567\”\n’))
msg = ser.read()
ser.write(bytes().fromstring(payload))
msg = ser.read()
ser.write(bytes().fromstring(‘\032’)) # 1A Ctrl-Z
msg = ser.read()
ser.flush()
print(‘SMS Done’)
tasmota.resp_cmnd_done()
end
tasmota.add_cmd(‘sms’, sim800l)
def p8() tasmota.cmd(“power8 toggle”) end
def p9() tasmota.cmd(“power9 toggle”) end
def p10() tasmota.cmd(“power10 toggle”) end
def p11() tasmota.cmd(“power11 toggle”) end
# tasmota.add_cron(“*/10 * * * * *”, p8, “Power8”)
# tasmota.add_cron(“*/15 * * * * *”, p9, “Power9”)
# tasmota.add_cron(“*/20 * * * * *”, p10, “Power10”)
# tasmota.add_cron(“*/25 * * * * *”, p11, “Power11”)