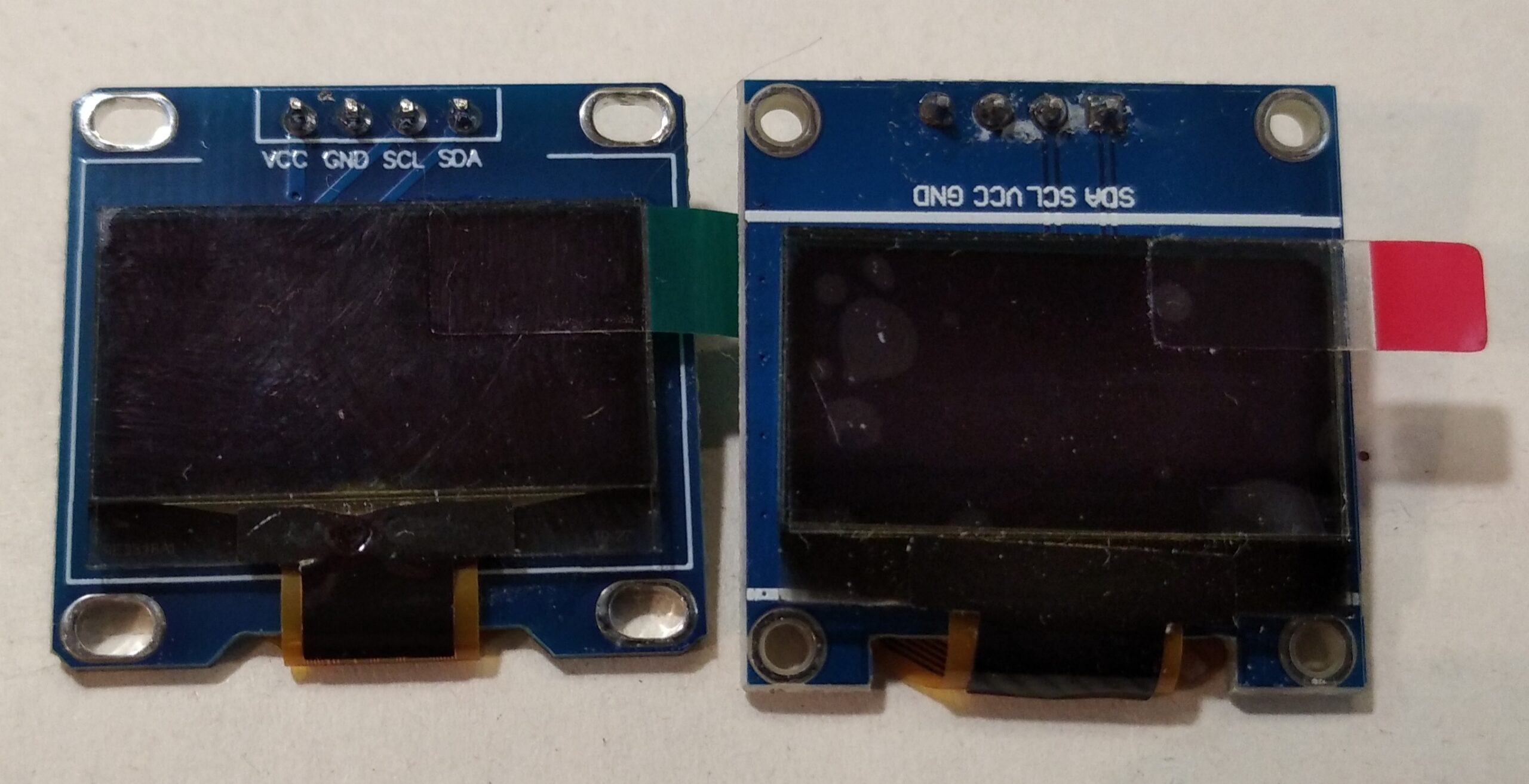
SSD1306 Будьте внимательны VCC and GND перепутаны.
Все для создания Роботов и не только.
SSD1306 Будьте внимательны VCC and GND перепутаны.
Если кому нужно продам. Пишите.
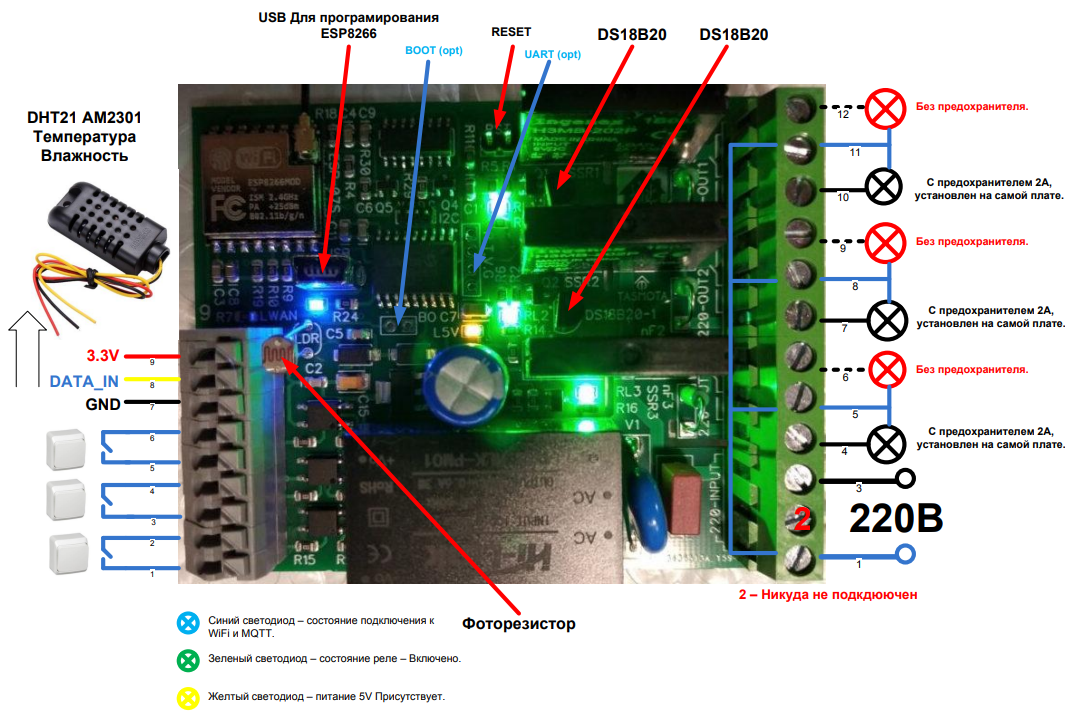
Подключение модуля SSR Version 1.0 (PDF)
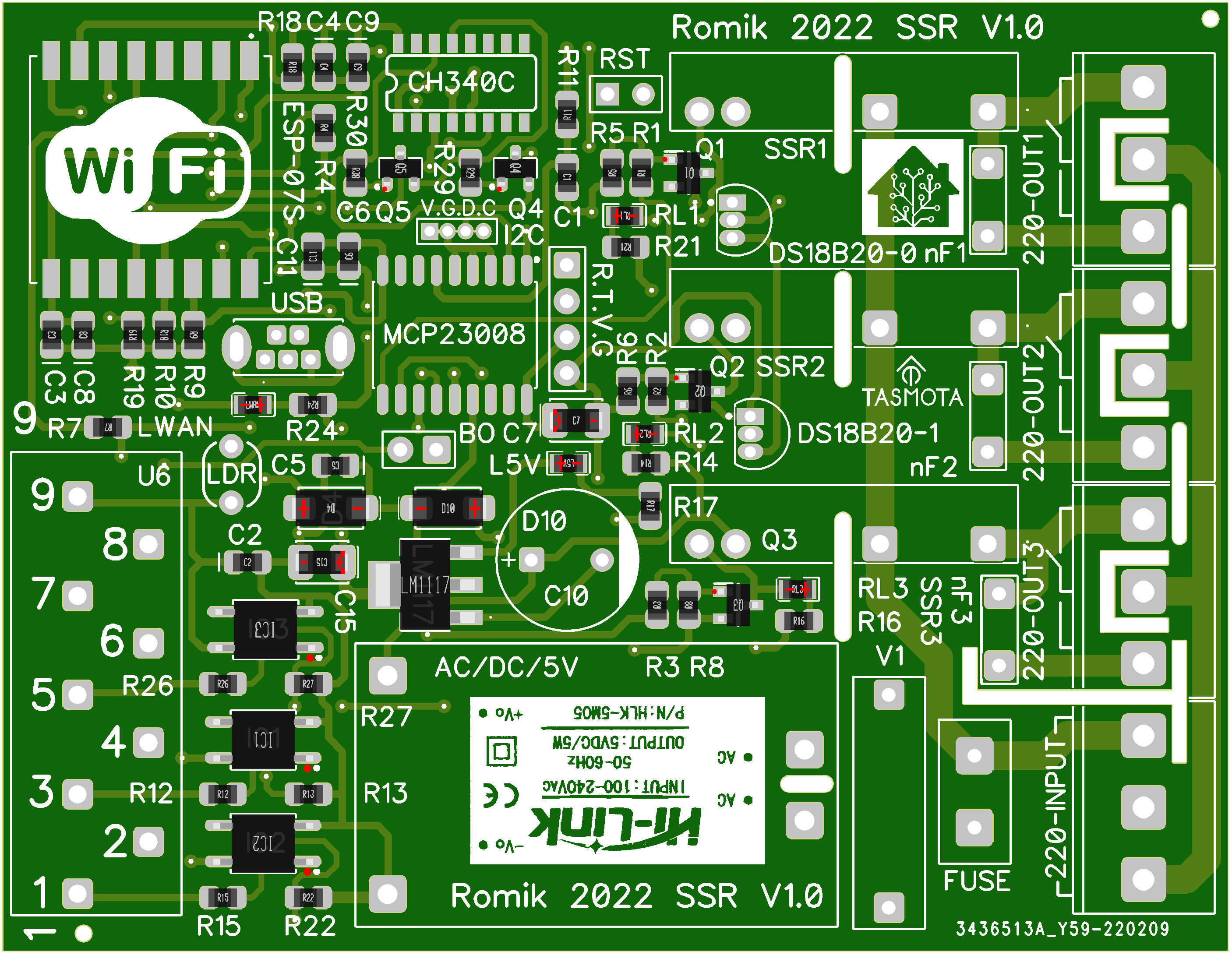
MCP23008-E/SO, 8-битный расширитель порта ввода/вывода
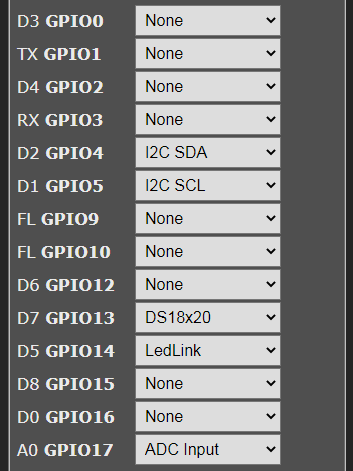
backlog sensor29 0,5,0; sensor29 1,5,0; sensor29 2,5,0
backlog sensor29 3,2,1; sensor29 4,2,1; sensor29 5,2,1
backlog SetOption36 0;SetOption65 1;wificonfig 4; SetOption59 1; TelePeriod 150; TimeZone +3
SetOption36 0 – 0 Disable boot loop control
SetOption65 1 – 1 Disable – Device recovery using fast power cycle detection
SetOption59 1 – 1 Enable Send tele/%topic%/STATE in addition to stat/%topic%/RESULT for commands: State, Power and any command causing a light to be turned on.
wificonfig 4 = Retry other AP without rebooting (default)
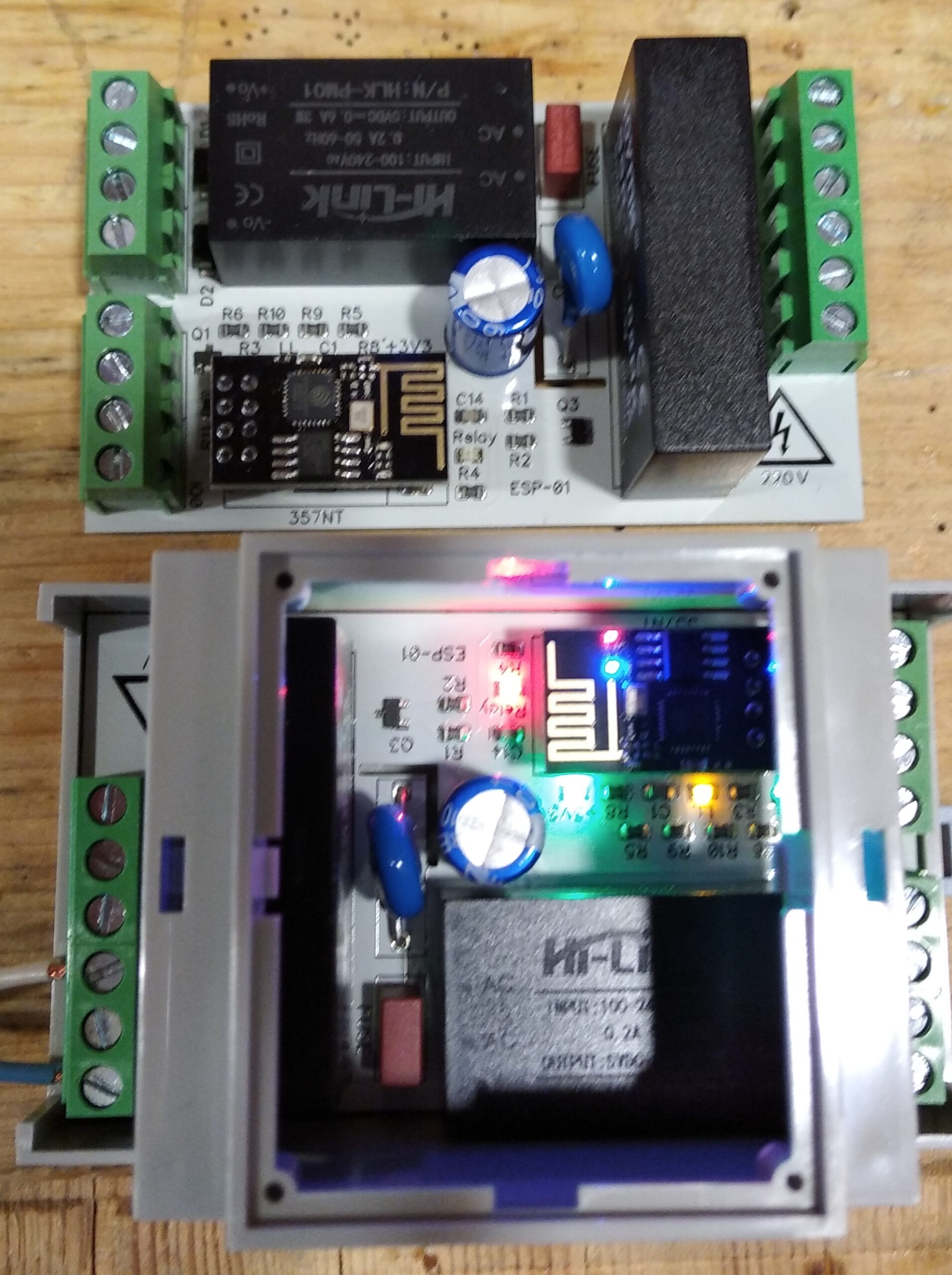
Корпус
https://www.chipdip.ru/product/d4mg
https://www.electronshik.ru/item/ECT/D4M-RU


Варистор: VDR-10D471K
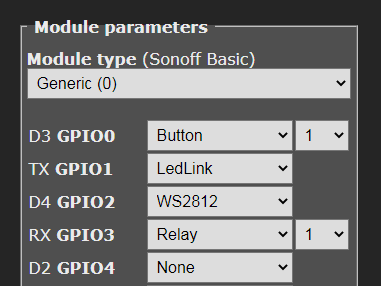
Схема: DipTrace Schematic – D3MG
Варианты использования:
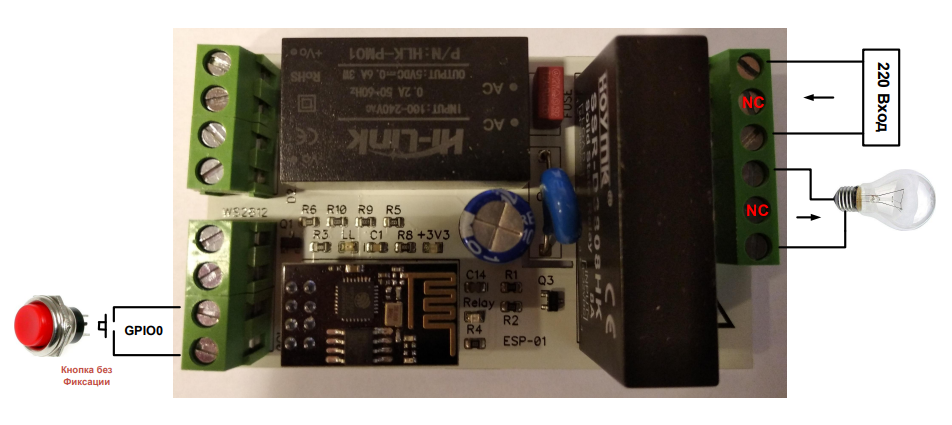
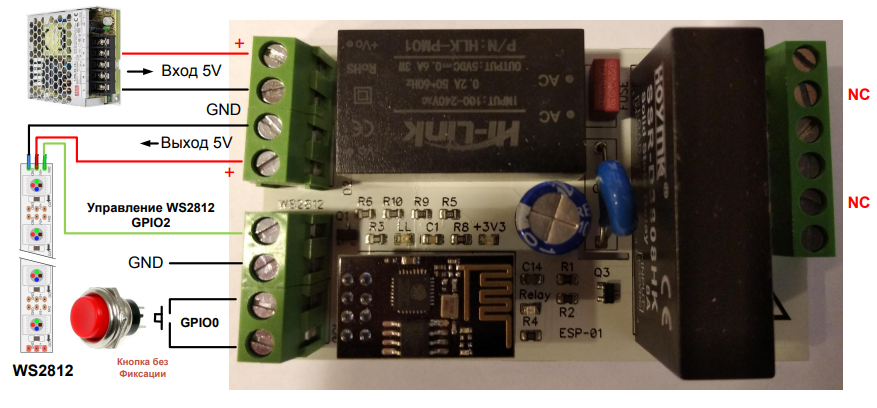
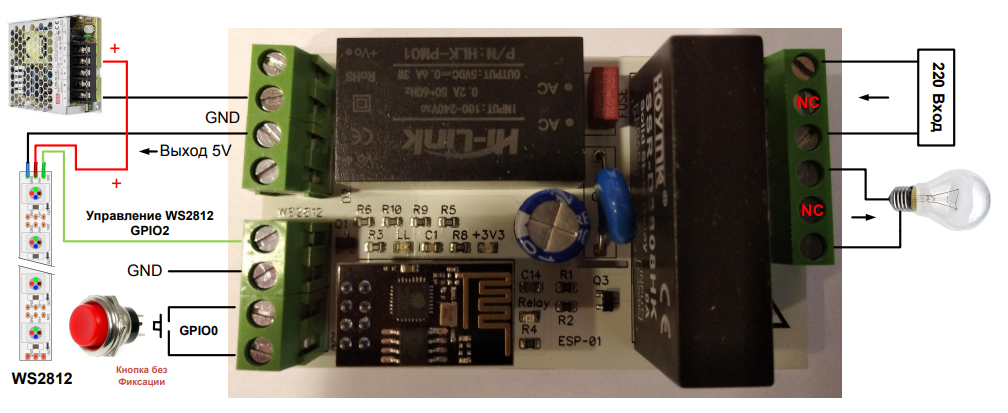
Нельзя одновременно подавать 5В на вход и подключать сети 220В.
Для управления WS2812 – можно использовать проект WLED.
Config для WS2812 Home-Assistant
- platform: mqtt
name: "WS2812 LED"
unique_id: "WS2812_LED_CTRL"
command_topic: "cmnd/5relayNew/POWER1"
state_topic: "stat/5relayNew/RESULT"
state_value_template: "{{value_json.POWER1}}"
brightness_command_topic: "cmnd/5relayNew/Dimmer"
brightness_state_topic: "stat/5relayNew/RESULT"
brightness_scale: 100
brightness_value_template: "{{value_json.Dimmer}}"
rgb_command_topic: "cmnd/5relayNew/Color"
rgb_state_topic: "stat/5relayNew/RESULT"
rgb_value_template: "{{value_json.Color.split(',')[0:3]|join(',')}}"
effect_command_topic: "cmnd/5relayNew/Scheme"
effect_state_topic: "stat/5relayNew/RESULT"
effect_value_template: "{{value_json.Scheme}}"
effect_list:
- 0
- 1
- 2
- 3
- 4
payload_on: "ON"
payload_off: "OFF"
availability_topic: "tele/5relayNew/LWT"
payload_available: "Online"
payload_not_available: "Offline"
qos: 1
retain: false

With Tasmota, you should set the number of leds too, using the Pixels command.