Работает, но не очень.
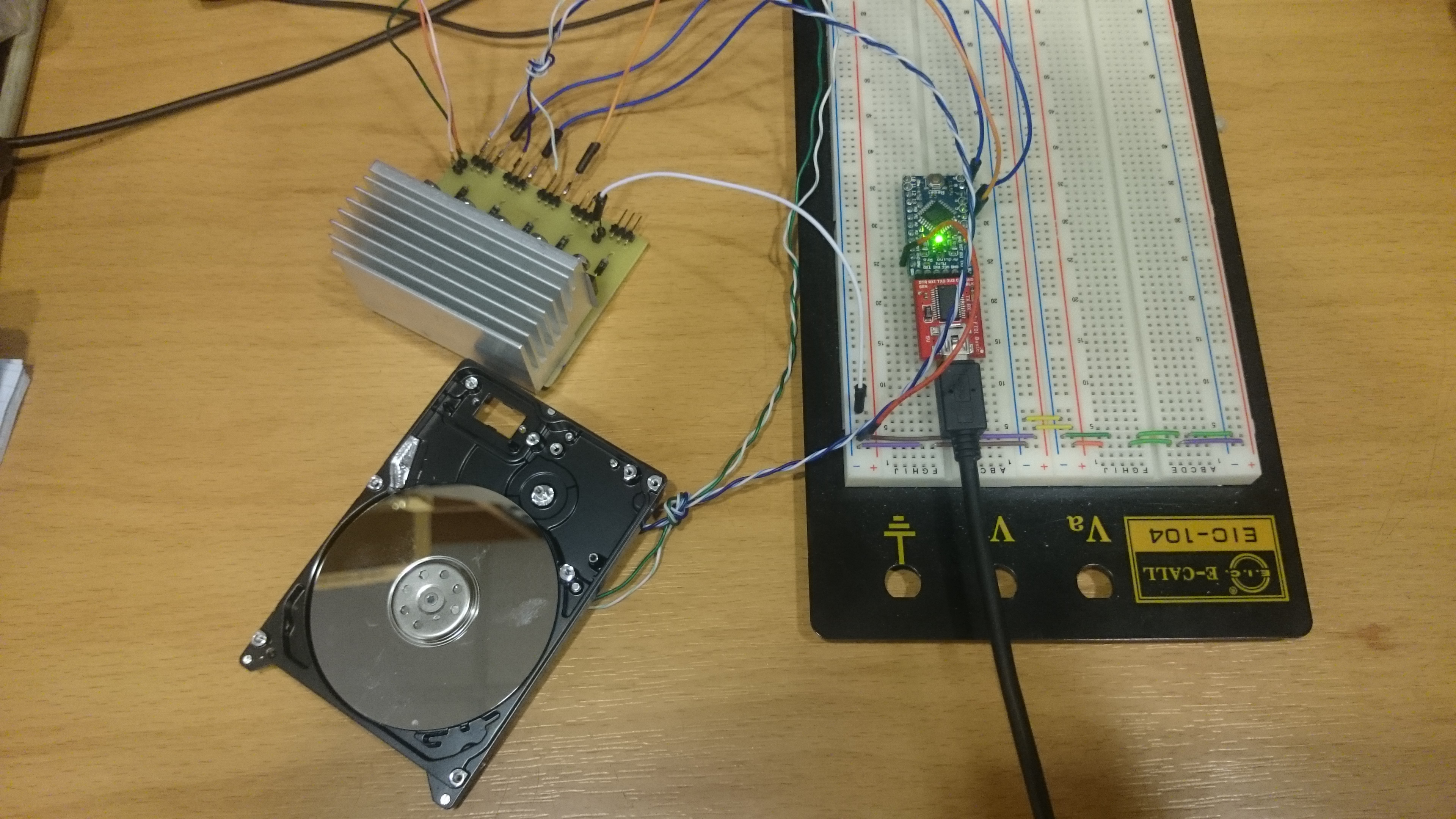
Драйвер для двигателей.
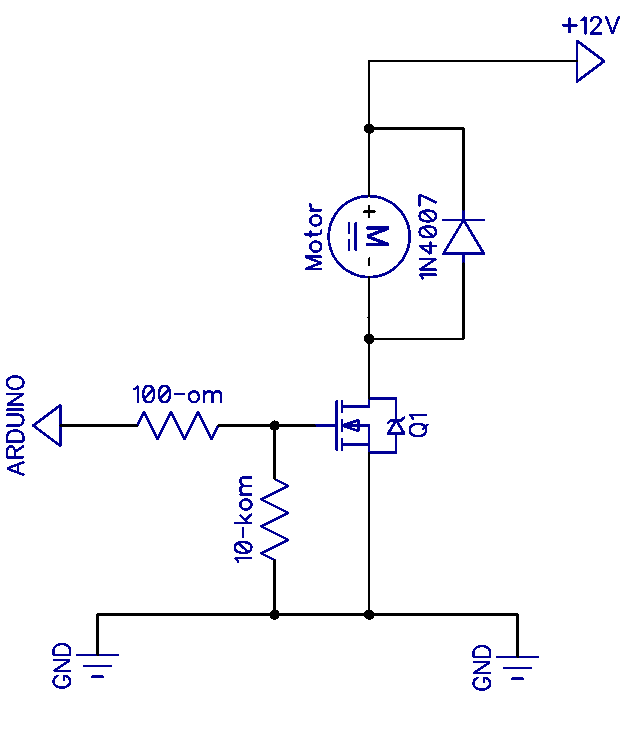
Источник: http://theamateurprogrammer.blogspot.com/2014/02/revitalizing-old-hard-drive-motors.html
int phase1 = 9;
int phase2 = 6;
int phase3 = 5;
int A = 9;
int B = 6;
int C = 5;
int led = 13;
unsigned long stepLength = 40000;
int minStepLength = 7000; //1400
int steps = 50;
void setup() {
pinMode(led, OUTPUT);
pinMode(phase1, OUTPUT);
pinMode(phase2, OUTPUT);
pinMode(phase3, OUTPUT);
analogWrite(led, LOW);
}
void loop() {
switchStep(1);
switchStep(2);
switchStep(3);
if(stepLength > minStepLength)
{
stepLength = stepLength - steps;
} else {
// set the minimum pulse length
stepLength=minStepLength;
}
if (stepLength < 39950) {
analogWrite(led, HIGH); // second gear
steps = 300;
}
if (stepLength < 20000) {
analogWrite(led, LOW); // third gear
steps = 50;
}
if (stepLength < 3000) {
analogWrite(led, HIGH); // fourth gear
steps = 2;
}
}
// CB, AB, AC, BC, BA, CA
void switchStep(int stage)
{
int PWM = 64;
switch(stage)
{
case 1:
analogWrite(phase1, PWM); // 100 ok
analogWrite(phase2, 0);
analogWrite(phase3, 0);
myDelay(stepLength);
break;
case 2:
analogWrite(phase1, 0);
analogWrite(phase2, PWM);
analogWrite(phase3, 0);
myDelay(stepLength);
break;
default:
analogWrite(phase1, 0);
analogWrite(phase2, 0);
analogWrite(phase3, PWM);
myDelay(stepLength);
break;
}
}
void myDelay(unsigned long p) {
if (p > 16380) {
delay (p/1000);
} else {
delayMicroseconds(p);
}
}
int phase2 = 6;
int phase3 = 5;
int A = 9;
int B = 6;
int C = 5;
int led = 13;
unsigned long stepLength = 40000;
int minStepLength = 7000; //1400
int steps = 50;
void setup() {
pinMode(led, OUTPUT);
pinMode(phase1, OUTPUT);
pinMode(phase2, OUTPUT);
pinMode(phase3, OUTPUT);
analogWrite(led, LOW);
}
void loop() {
switchStep(1);
switchStep(2);
switchStep(3);
if(stepLength > minStepLength)
{
stepLength = stepLength - steps;
} else {
// set the minimum pulse length
stepLength=minStepLength;
}
if (stepLength < 39950) {
analogWrite(led, HIGH); // second gear
steps = 300;
}
if (stepLength < 20000) {
analogWrite(led, LOW); // third gear
steps = 50;
}
if (stepLength < 3000) {
analogWrite(led, HIGH); // fourth gear
steps = 2;
}
}
// CB, AB, AC, BC, BA, CA
void switchStep(int stage)
{
int PWM = 64;
switch(stage)
{
case 1:
analogWrite(phase1, PWM); // 100 ok
analogWrite(phase2, 0);
analogWrite(phase3, 0);
myDelay(stepLength);
break;
case 2:
analogWrite(phase1, 0);
analogWrite(phase2, PWM);
analogWrite(phase3, 0);
myDelay(stepLength);
break;
default:
analogWrite(phase1, 0);
analogWrite(phase2, 0);
analogWrite(phase3, PWM);
myDelay(stepLength);
break;
}
}
void myDelay(unsigned long p) {
if (p > 16380) {
delay (p/1000);
} else {
delayMicroseconds(p);
}
}