Проверка работоспособности STM32F405 MicroPython
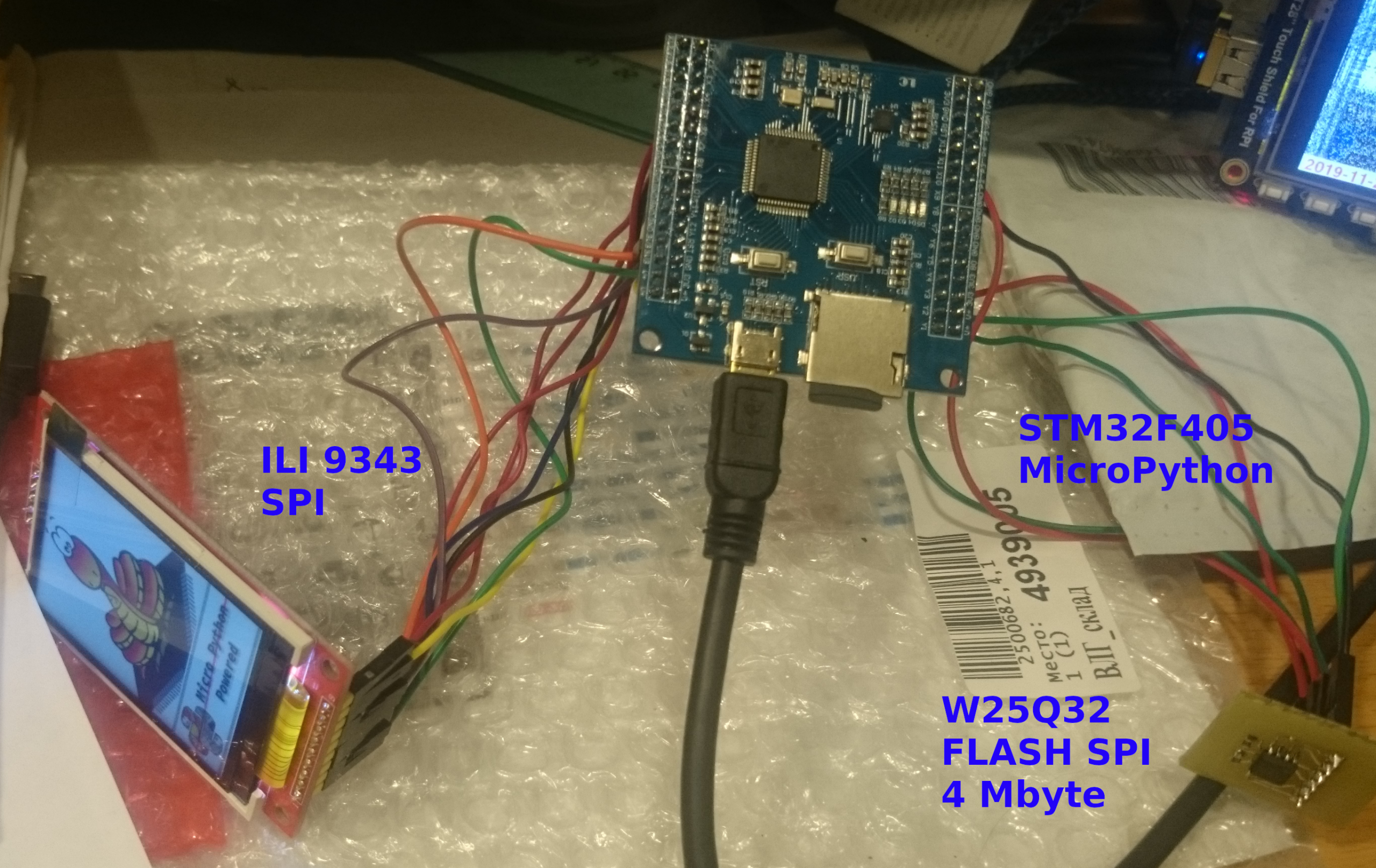
STM32F405 Копия PyBoard V1.1 c MicroPython
X17 – Лучше не использовать (BOOT1)
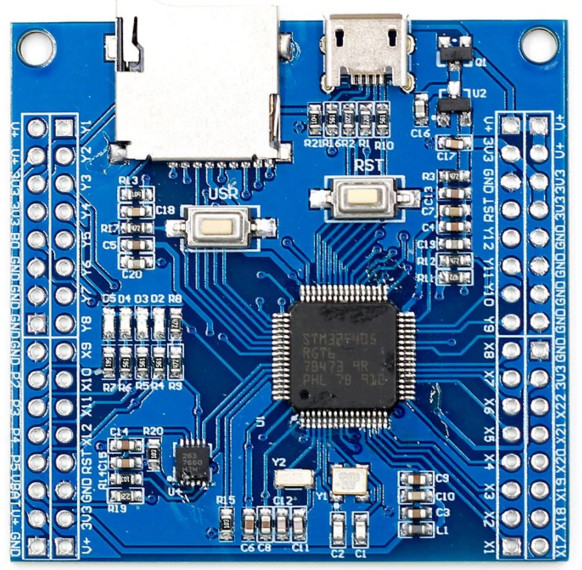
1. STM32F405RG MCU
2. 168 мгц Cortex-M4 Процессор с 32-битными оборудования с плавающей точкой
3. 1 мб флэш-памяти, 192 кб оперативной памяти
4. USB порт, последовательный порт, универсальная память, HID протокол
5. Слот для sd-карты
6. MMA76603 осевой ускоритель
7. 4 светодиода, одна кнопка сброса, одна универсальная кнопка
8. 3 V 0.3A на борту LDO, питание от USB или внешний аккумулятор
9. Часы в режиме реального времени
10. 30 шт GPIO 28 шт. из них поддерживают вход и выход 5 в
11. 2xSPI, 2xCAN, 2xI2C, 5xUART, 14 шт 12 бит ADC PIN, 2 ADC PIN
Если SDCARD не вставлена то загрузка boot.py происходит с FLASH памяти. Если SDCARD вставлена, то загрузка происходит с этой карточки.
Firmware suitable for PYBv1.1 boards: http://micropython.org/download#pyboard
Для прошивки нужно B0 подключить к 3V3.
Схем в интернете не нашел. Оригинальная схема конечно не соответствует. http://docs.micropython.org/en/latest/pyboard/general.html
Моя копия схемы.PYBv11

Pinout Excel: STM32F405-MICROPYTHON
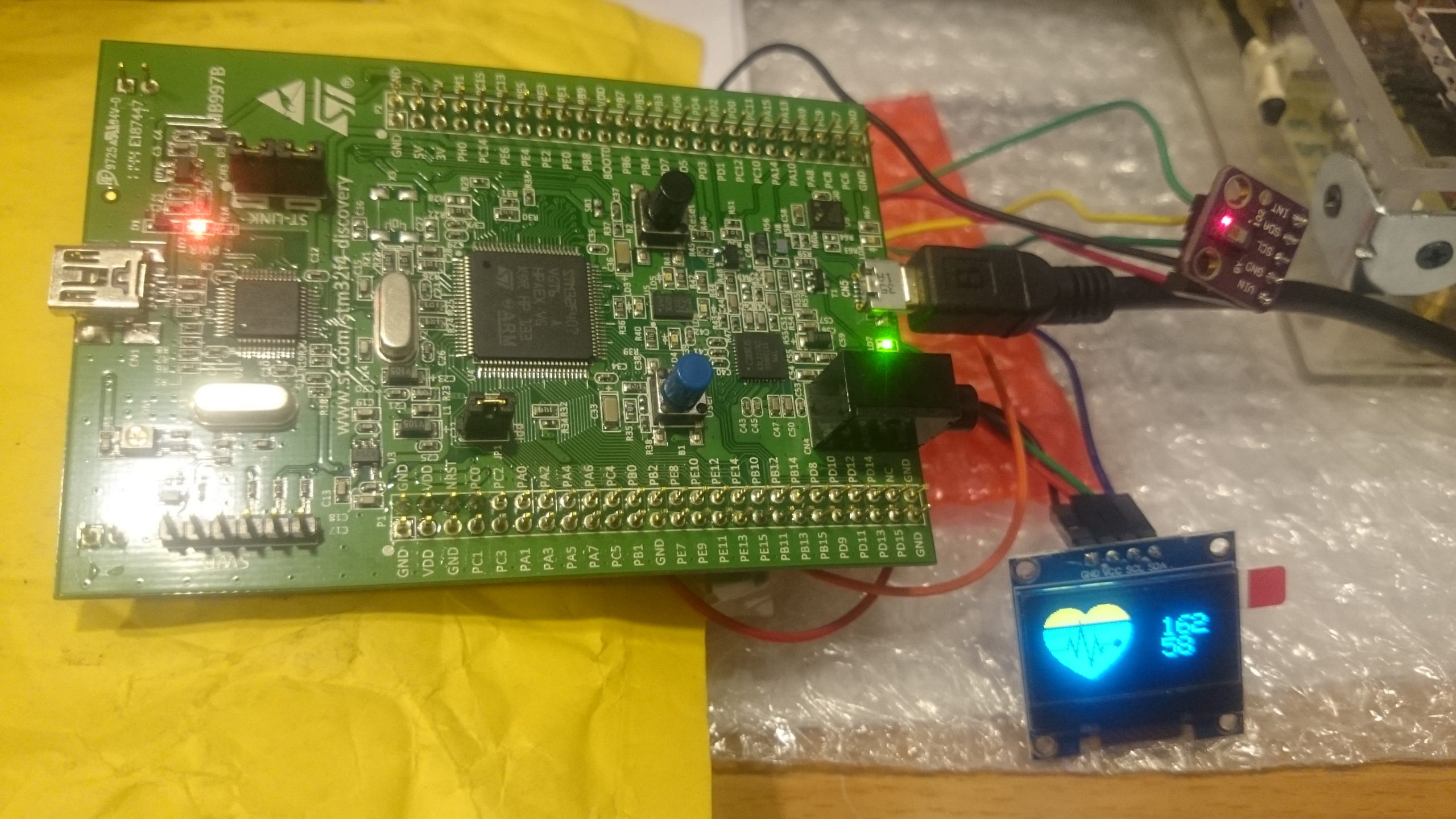
MAX30102 Датчик пульса пульсоксиметра + MicroPython
Описание: Пульсоксиметрия от Maxim: новый датчик MAX30102
Micropython + STM32F4Discovery = Работает
Подправил для STM32F4Discovery: max30102
- I2C(1) = MAX30102
- I2C(2) = SSD1306
- I2C(1) is on the X position: (SCL, SDA) = (X9, X10) = (PB6, PB7)
- I2C(2) is on the Y position: (SCL, SDA) = (Y9, Y10) = (PB10, PB11)
DSN-VC288 подключение.
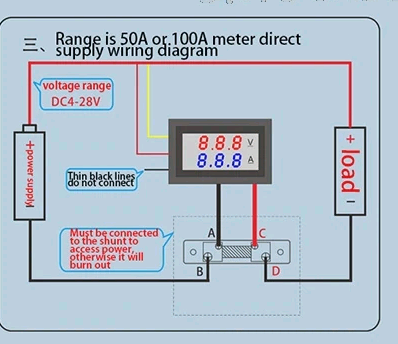
Другой вариант.
